
ساخت ربات عدم برخورد به مانع با آردوینو و التراسونیک

سلام. پروژه آردوینو ربات با سنسور التراسونیک ( عدم برخورد ربات به مانع ) آماده کردیم. در این پروژه آردوینو ما رباتی را میسازیم که با نزدیک شدن به مانع مثل دیوار متوقف میشود و تغییر مسیر میدهد.
پروژه آردوینو ربات با سنسور التراسونیک
ما در این پروژه یک ربات هوشمند را میسازیم که وقتی حرکت میکند به مانع برخورد نمیکند ، زیرا از سنسور التراسونیک استفاده کردیم تا مانع را تشخیص بدهد و جهت حرکت را تغییر بدهد. این سیستم که ما پیاده سازی کردیم باعث میشود ربات ما در محیط ناشناخته بدون برخورد به مانع حرکت کند. این میتواند یک ویژگی فوق العاده باشد! سیستم عدم برخورد به مانع زیاد ناشناخته نیست و در اکثر سازمان های نطامی مورد استفاده قرار گرفته و میگیرد و خواهد گرفت ! زیرا این سیستم باعث میشود ربات بتواند کار های خطرناکی را انجام بدهد که برای یک سرباز عادی ریسک بالایی دارد.
ما قبلا در وبسایت تخصصی الکترونیک آیرنکس پروژه های ساخت ربات دیگری را منتشر کردیم :
- کنترل ربات با حرکت دست آردوینو (پروژه آردوینو)
- کنترل ربات با موبایل آردوینو (کنترل ربات از طریق تماس)
- کنترل ربات با کامپیوتر (پروژه آردوینو ربات ماشین)
این پروژه شامل :
- آشنایی با سنسور التراسونیک HC-SR04
- استفاده از ماژول درایور موتور LM298N در پروژه آردوینو
- ساخت ربات با ویژگی عدم برخورد با مانع
مدار پروژه ربات عدم برخورد با مانع آردوینو

- برد آردوینو
- سنسور التراسونیک HC-SR04
- ماژول درایو موتور LM298N
- تایر ها و موارد مورد نیاز برای ساخت ماشین
- دانلود کامپایلر آردوینو
سنسور التراسونیک در پروژه عدم برخورد ربات به مانع
خب ما باید یه اطلاعات کلی نسبت به سنسور التراسونیک داشته باشیم !

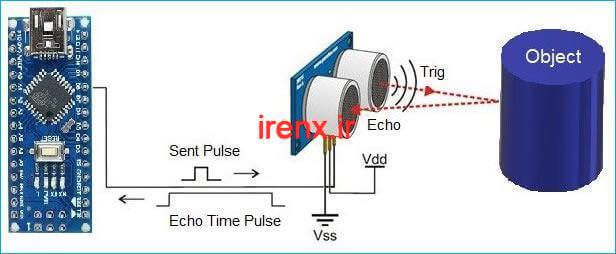
ما میدونیم که ارتعاش صدا نمیتونه از طریق جامدات نفوذ کنه !. بنابراین وقتی یک منبع صدا باعث ایجاد ارتعاش میشه ، اونها از طریق هوا با سرعت 220 متر در هر ثانیه حرکت میکنن !. همونطور که گفتیم این ارتعاش ها نمیتونن از طریق جامد نفوذ کنن ، یعنی وقتی به یک سطح مثل دیوار برخورد کنن ، با همون سرعت برمیگردن به سمت سنسور ، این تکنیک اکو (ECHO) نامگذاری شده .!
پروژه التراسونیک آردوینو
سنسور التراسونیک “HC-SR04” یک سیگنال خروجی متناسب با فاصله بر اساس اکو فراهم می کنi. سنسور در اینجا یک لرزش صدا را در محدوده اولتراسونیک ایجاد می کنi، و بعد از فرستادن یک ارتعاش ، برای ارتعاش صدا منتظر می ماند. در حال حاضر بر اساس پارامترها، سرعت صدا (220m / s) و زمان گرفته شده برای اکو برای رسیدن به منبع، پالس خروجی متناسب با فاصله را فراهم می کنه.
همانطور که توی شکل نشان داده شده ، ما ابتدا باید سنسور را برای اندازه گیری فاصله راه اندازی کنیم، این یک سیگنال منطقی بلند در سنسور ترمینال برای بیش از 10uS است، بعد از آن یک ارتعاش صدا توسط سنسور ارسال میشه، پس از یک اکو، سنسور یک سیگنال در پین خروجی که متناسب با فاصله بین منبع و مانع فراهم می کنه .




برای دانلود فایل ها باید حساب کاربری داشته باشید ثبت نام / ورود






سلام باطری چند ولت استفاده کنیم؟ التراسونیک چجور وصل کنم؟ نقشه معلوم نیست
سلام عزیز
تصویر مدار در صفحه قرار داده شده است و باطری 9 ولت استفاده شده است.
سلام برنامه نویسیش رو از کجا تهیه کنم
لطفا جواب بدید
سلام عزیز
در انتهای مقاله لینک دانلود کد ها قرار داده شده است
سلام آقای رحیمی میشه بی زحمت آموزش درست کردن این پروژه رو روی برد آردینو اونو هم بزارید
رباتی که تعقیب کننده باشه و بتونه فاصله ی ده سانتی متری و دید تعقیب کنه! میشه راهنمایی کنید با چی فاصله رو میشه حفظ کرد؟؟؟؟
سلام خسته نباشید
شما در نقشه پین های دیتای ماژول الراسونیک را اشتباه زدید
متشکرم
سلام عزیز
ممنون از اطلاع رسانی شما
خواهش میکنم
سلام آردوینو من روشن میشه ولی کلن ربات کار نمیکنه
۸ولت ۲ آمپر تغذیه زدم
سلام عزیز
باید بررسی کنید مشکل در کدام قسمت هست
خروجی موتور درایور های شما کار میکنند؟
سلام خسته نباشید
ایا پرو گرم شما روی برد های اردینو Unoهم کار می کند
من پرو گرم شما رو روی برد اردینو Uno هم زدم
متور ها هر جوری دوست دارن دارن کار میکنن
سلام عزیز
برنامه برای برد اونو تفاوتی ندارد و یکسان هست
بررسی کنید کجای مدار شما اشتباه هست
متشکرم
سلام از کدهای آردوینو میشه برای ESP32 هم استفاده کرد؟ یعنی کدی که برای راه اندازی یک سنسور با آردوینو هست رو میشه برای راهاندازی اون سنسور با ESP32 استفاده کرد؟ تغییری لازم نداره ؟
سلام عزیز
برای اکثر کد ها نیاز به تغییرات هست.
یعنی که باید کدش رو اضافه کنم؟
بله مقادیر التراسونیک را پرینت بگیرید
سلام خسته نباشید.
من تمام کار هارو انجام دادم ولی وقتی برق رو متصل میکنم متورها کاملا سرخود میچرخند ایا امکان داره مشکل از سنسور باشه لطفا راهنمایی کنید ممنون.
سلام عزیز
داده هایی از التراسونیک دریافت میکنید را در سریال مانیتور چاپ کنید تا بتوانید دیباگ کنید
سلام خسته نباشید ببخشید من الان منفی l298 رو به منفی اردواینو متصل میکنم ارداینو روشن نمیشه ولی قبلش روشن شد تمام سیم کشی هارو انجام دادم بازم روشن نشد لطفا راهنمایی کنید ممنون
سلام عزیز
آردوینو شما کاملا روشن نمیشود یا فقط وقتی GND متصل میکنید؟
و اینکه استارت این ماشی با کنترل هست و یا با چیز دیگه؟
میتونید در مسیر باتری یک سوئیچ قرار بدید تا ربات رو فعال / غیرفعال کنید
سلام وقتتون خسته نباشید بخیر این کار را می توان با Node mcu esp8266 انجام داد؟
سلام عزیز
بله میشه انجام داد، نیاز به تغییر کد هست
سلام ببخشید میخواستم بدونم با برد بورد و ماژول l293d هم میشه
سلام عزیز
بله
سلام. من میخوام که یه ماشین بزرگ الکترونیکی اندازه ی یک نو جوان ۱۲ ساله رو درست کنم و میخوام که داخل ماشین از این سیستم عدم برخورد از مانع کار بزارم آیا به نظر شما این کار شدنی انجام شدنیه؟؟؟؟؟
سلام عزیز، بله شدنی هست.
یعنی منظورتون اینه من خروجی رگولاتورم رو وصل کنم به ترمینال ورودی L298 ( همون قسمت ک 12 ولت نوشته)؟
اخه اینجوری ک ماژولم روشن نمیشه
به خروجیش متصل کنید، جایی که به موتور متصل میشه.
سلام
ببخشید وقتی موتورهای ما 5 ولت هستند و ولتاژ ورودی ماژول درایور L298 مون به اداپتور 12 ولت وصله برای اینکه با این ولتاژ موتورمون نسوزه باید چیکار کنیم؟
سلام عزیز، میتونید از رگولاتور 7805 استفاده کنید.
سلام ببخشید با برد اردوینو اونو هم میشه؟
سلام جناب، بله.
سلام
کامپیوترم مدتی خراب بوده و فروختم و الان هنوز تصمیم خرید ندارم میشه بگید برای برنامه ریزی ربات از موبایل استفاده کرد یا نه
سلام جناب. بله میتونید برد های آردوینو رو با موبایل اندروید برنامه ریزی کنید. دانلود نرم افزار آردوینو برای اندروید (آموزش پروگرام کد با گوشی) را مشاهده کنید.
سلام میشه بگید چجوری کد ها را در آردینو نانو آپلود کنیم من هر کاری کردم ارور داد
سلام جناب، آموزش آپلود کد در آردوینو رو مشاهده کنید.
سلام من از ماژول srf-05 استفاده میکنم ولی با اینکه بخشی از مد را تغییر میدهم باز هم کار نمی کند باید چه کنم
سلام جناب. اساس کار سنسور SRF-05 تفاوتی نداره و بدون تغییر مدار باید پروژه کار کنه.