
کنترل ربات با سنسور ژیروسکوپ موبایل و آردوینو

سلام. پروژه کنترل ربات با سنسور ژیروسکوپ موبایل و آردوینو را آماده کردیم.
آموزش کنترل ربات با ژیروسکوپ موبایل اندروید و آردوینو
در این پروژه آردوینو قصد داریم از طریق سنسور ژیروسکوپ تلفن همراه خود ربات اتومبیل را کنترل کنیم و شما قادر خواهید بود فقط با کج کردن تلفن، ربات را کنترل کنید. ما همچنین برای این ربات از Arduino و برنامه RemoteXY استفاده خواهیم کرد. برنامه RemoteXY برای ایجاد ارتباط بین تلفن هوشمند و برد آردوینو برای کنترل ربات استفاده می شود. ما جوی استیک را در این برنامه اضافه خواهیم کرد تا ربات بتواند توسط جوی استیک و همچنین با کج کردن گوشی کنترل شود. این پروژه هم با استفاده از IOS و هم Android کار میکند.
سنسور G یا همان G-Sensor در اصل سنسور شتاب سنج تلفن هوشمند است که برای یافتن جهت نمایش صفحه استفاده میشود. شتاب سنج جهت های Z, Y و X را بدست می آورد. اکنون شتاب سنج ها بسیار دقیق و حساس هستند. در این پروژه ربات ما مطابق با مسیری که تلفن را کج کرده ایم حرکت میکند. مثلا هنگامی که تلفن را در شیب رو به جلو قرار میدهیم ربات به سمت جلو حرکت میکند و برای چهار جهت دیگر نیز به همین صورت است. این پروژه مانند کنترل ماشین در بازی ها است با این تفاوت که بجای کنترل ماشین درون گوشی موبایل اندروید، ربات ماشین ساخته ی ما کنترل میشود. فیلم عملکرد این پروژه در انتهای صفحه قرار داده شده است.
فیلم زیر نحوه عملکرد پروژه را به شما نشان میدهد :
کنترل ربات با نرم افزار اندروید RemoteXY
برای ایجاد رابط کاربری برای کنترل ربات ماشین با استفاده از برنامه RemoteXY ، باید به لینک روبرو بروید : ایجاد رابط کاربری اندروید با RemoteXY
صفحه وبی به صورت زیر ظاهر می شود :

سپس از سمت چپ صفحه، دکمه سوئیچ و جوی استیک را برداشته و آن را در موبایل قرار دهید. این دکمه چراغ را در پین 13 روشن می کند که به صورت داخلی در آردوینو متصل شده و جوی استیک ربات را جابجا می کند. صفحه وب بعد از قرار دادن سوئیچ و جوی استیک به این شکل در می آید.

سپس ما باید دکمه فعال کردن/غیرفعال کردن حسگر G را به همراه جوی استیک قرار دهیم تا بتوانیم با کج کردن گوشی در جهت چپ ، راست ، بالا و پایین ، ربات خودرو را حرکت دهیم. با استفاده از آن دکمه می توانیم سنسور G را فعال و غیرفعال کنیم، هنگامی که سنسور G غیرفعال است با حرکت Joystick می توان ماشین را کنترل کرد. بنابراین برای قرار دادن دکمه فعال / غیر فعال کردن حسگر G ، روی جوی استیک که در موبایل قرار داده اید کلیک کنید و در سمت چپ یک بخش وجود خواهد داشت ، در پایان گزینه ای برای قرار دادن دکمه حسگر G در نزدیکی جوی استیک وجود دارد ، بنابراین دکمه حسگر G را در هر جایی که دوست دارید قرار دهید. صفحه وب بعد از این به صورت زیر ظاهر می شود.

پس از آن ، بر روی دکمه “Get source code” کلیک کرده و آن را روی رایانه خود ذخیره کنید. کتابخانه مربوط به این نرم افزار را که در فایل دانلودی انتهای صفحه قرار داده شده است نصب کنید. همچنین باید برنامه اندروید را دانلود کنید. دانلود نرم افزار اندروید Remote XY
مدار کنترل ربات با ژیروسکوپ موبایل و آردوینو
تصویر زیر شماتیک مدار پروژه کنترل ربات ماشین با سنسور ژیروسکوپ را نمایش میدهد.

اول از همه ، ما کنترلر موتور L298N را به Arduino متصل خواهیم کرد. پین ENA و ENB کنترلر موتور را به ترتیب به پین آردوینو 12 و 11 وصل کنید. این دو پین برای کنترل PWM موتور است. با استفاده از این پین ها می توان سرعت خودرو را افزایش یا کاهش داد. سپس IN1 ، IN2 ، IN3 و IN4 را به ترتیب به پین های 10 ، 9 ، 8 و 7 برد آردوینو وصل کنید. این پین ها باعث چرخش موتورها در هر دو جهت (جهت حرکت عقربه های ساعت و عکس جهت عقربه های ساعت) می شوند.



برای تغذیه موتور ، مثبت و منفی باتری را به 12 ولت و GND درایور موتور وصل کنید. سپس 5 ولت و GND را از درایور موتور به GND و Vin آردوینو وصل کنید.
سپس ماژول بلوتوث HC-06 را به آردوینو متصل خواهیم کرد. اگر شما HC-05 داشته باشید هم کار خواهد کرد. سپس پین TX ماژول بلوتوث را به پین 2 آردوینو و پین RX به پین 3 آردوینو متصل کنید. همچنین برای آشنایی بیشتر برای استفاده از بلوتوث با آردوینو ، از ماشین اسباب بازی کنترل شده بلوتوث با استفاده از آردوینو نیز استفاده کنید.
قطعات مورد نیاز
- برذ آردوینو UNO
- ماژول موتور درایور L298N
- ماژول بلوتوث HC-06 یا HC-05
کد کنترل ربات با ژیروسکوپ و جوی استیک مجازی و آردوینو
کد کامل پروژه در انتهای صفحه در فایل دانلودی قرار داده شده است. در اینجا بعضی از قسمت های کد را بررسی میکنیم.
اول از همه ، کتابخانه های ارتباط سریال و RemoteXY را فراخوانی میکنیم. کتابخانه RemoteXY به ما در تنظیم برنامه با Arduino کمک می کند ، که از طریق آن ماشین ربات را کنترل خواهیم کرد. پس از آن ما پین ها را برای ماژول بلوتوث تعریف کرده ایم ، TX از ماژول بلوتوث به پین 2 آردویو متصل می شود و RX از ماژول بلوتوث به پین 3 Arduino متصل می شود.
#define REMOTEXY_MODE__SOFTWARESERIAL #include <SoftwareSerial.h> //فراخوانی کتابخانه ارتباط سریالی #include <RemoteXY.h> //فراخوانی کتابخانه remotexy /* RemoteXY connection settings */ #define REMOTEXY_SERIAL_RX 2 //تنظیم پین RX #define REMOTEXY_SERIAL_TX 3 //تنظیم پین TX #define REMOTEXY_SERIAL_SPEED 9600 //تنظیم baudrate روی 9600
کد زیر باعث افزایش یا کاهش سرعت موتور می شود. هنگامی که جوی استیک در مرکز باشد سرعت صفر خواهد بود و هنگامی که در جهت رو به جلو باشد سرعت از صفر به 100 افزایش می یابد. و در جهت عکس نیز سرعت حرکت از 0 به -100 کاهش می یابد.
if (motor_speed>100) motor_speed=100;
if (motor_speed<-100) motor_speed=-100;
if (motor_speed>0) {
digitalWrite(pointer[0], HIGH);
digitalWrite(pointer[1], LOW);
analogWrite(pointer[2], motor_speed*2.55);
}
else if (motor_speed<0) {
digitalWrite(pointer[0], LOW);
digitalWrite(pointer[1], HIGH);
analogWrite(pointer[2], (-motor_speed)*2.55);
}
else {
digitalWrite(pointer[0], LOW);
digitalWrite(pointer[1], LOW);
analogWrite(pointer[2], 0);
} در کد زیر ، عملکردی را تعریف کردیم که هر زمان که جوی استیک را در برنامه حرکت دهیم، فراخوانی می شود. وقتی سوئیچ را در برنامه روشن کنیم، پین 13 آردوینو که به ال ای دی متصل است 1 میشود.
void loop()
{
RemoteXY_Handler ();
digitalWrite (ledpin, (RemoteXY.switch_1==0)?LOW:HIGH);
Speed (first_motor, RemoteXY.joystick_1_y - RemoteXY.joystick_1_x);
Speed (second_motor, RemoteXY.joystick_1_y + RemoteXY.joystick_1_x);
} نحوه اجرا و فیلم عملکرد پروژه
كتابخانه RemoteXY را به كتابخانه های Arduino اضافه كنید و كد را در Arduino IDE بارگذاری كنید. سپس برنامه را در تلفن همراه خود نصب کرده و سپس بلوتوث را روشن کنید. رابط کاربری برنامه به این شکل ظاهر خواهد شد.
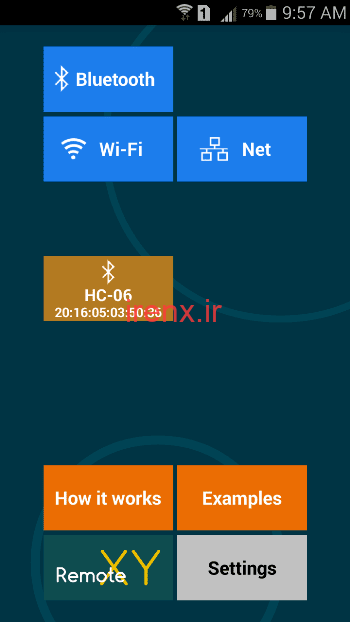
سپس به بلوتوث بروید و آن را روشن کنید. پس از روشن کردن ، دستگاه های بلوتوث را به شما نشان می دهد. ماژول بلوتوث HC-06 خود را از آنجا انتخاب کنید ، از آنجا می توانید Robot Car را کنترل کنید.

اینگونه است که می توانیم از سنسور شتاب سنج درون تلفن همراه خود برای جابجایی ربات استفاده کنیم.
موارد موجود در فایل : سورس آردوینو ، شماتیک پروژه
برای دانلود فایل ها باید حساب کاربری داشته باشید ثبت نام / ورود





با سلام و خسته نباشید
توی برنامه همون بخش اول کد RemoteXY.h رو شناسایی نمیکنه (تغیر رنگ نمیده)
فایل ارور =Arduino: 1.8.19 (Windows Store 1.8.57.0) (Windows 10), Board: “Arduino Uno”
sketch_sep09a:3:10: fatal error: RemoteXY.h: No such file or directory
#include فراخوانی کتابخانه// remotexy
^~~~~~~~~~~~
compilation terminated.
exit status 1
RemoteXY.h: No such file or directory
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
چی کار کنم درست بشه؟
سلام عزیز
کتابخانه remotexy را نصب کنید
سلام چه نوع ارمیچری نیاز هست
سلام عزیز
آرمیچر کم مصرف با گیربکس مناسب
سلام محیط نرم افزار رو چطور درست کنیم ؟
کلید شیفت بین جوی استک و جیروسکپ رو پیدا نمیکنم ؟
میشه کمک کنید .
یا محیط نرم افزار رو ارسال بکنید
ممنون
سلام
خسته نباشید
کد ارور میده
این قسمت =
;unsigned char first_motor[3] ={IN1, IN2, ENA}
خطا=در این محدوده اعلام نشده
چکار کنم درست بشه؟
سلام عزیز
من بررسی کردم کد بدون مشکل هست
متن خطا رو کامل بفرستید یا در انجمن تصویر ارور رو ارسال کنید
میشه راهنماییم کنید
من ماژول بلوتوثHC-05 دارم چه تفاوتی در کد ها ایجاد کنم؟
سلام عزیز
نیازی به تغییر در کد ها نیست
سلام
خسته نباشید
من سورس کامل پروژه را نمیتونم استخراج کنم
لطفا برام ارسال کنید🙏
سلام عزیز،
از نرم افزار WinRAR استفاده کنید
سلام ببخشید میشه اگه ارمیچر ۳ ولت داشته باشم میشه از باطری ۳ولت استفاده کرد
سلام جناب، بله میتونید ولی باید آردوینو رو با ولتاژ بالاتر تغذیه کنید
با سلام خدمت دوست عزيز لطفا راهنمايي بفرماييد من يه ماشين كنترلي دارم دسته جوي استيك نداره كه مي خوام به جاش از گوشي استفاده كنم برد اردوينو و l298n ,و ماژول hc05 رو هم خريدم مشكل برنامه نويسي دارم در ضمن ماشين من 2 موتوره س موتور عقب و جلو (فرمان چپ و راست ) داره لطفا راهنمايي بفرماييد .093***6772
سلام جناب، موردی که میخواهید رو ما به طور کامل در دوره آموزش آردوینو توضیح داده ایم. دوره رو مشاهده کنید.