
مدار پل h با ترانزیستور (ساخت H-bridge با ترانزیستور)

در اینجا، نحوه ساخت مدار H-Bridge با ترانزیستور را نشان خواهیم داد.
پل h چیست؟

پل H مداری است که در ابتدا برای کنترل موتور ها مورد استفاده قرار می گیرد. آن ها اجازه حرکت به جلو و عقب موتور ها را می دهند. بنابراین، موتور می تواند با قابلیت دو طرفه خود مورد استفاده قرار گیرد.
برای ساخت پل H تنها راه استفاده از تراشه IC برای H-Bridge نیست، شما می توانید آن را با اجزای ساده ای مانند ترانزیستور و مقاومت بسازید.
حتی اگر استفاده از یک IC خوب مانند L239 به عنوان یک پل H تقریباً ساده تر باشد، ممکن است مواردی پیش بیاید که بخواهید خودتان آن را طراحی کنید. فقط ممکن است بخواهید بدانید یک پل H چگونه کار می کند.
بنابراین در این مدار، ما یک پل H با ترانزیستور های اتصال دو قطبی خواهیم ساخت.
از آنجا که موتور ها مقدار زیادی جریان استفاده می کنند، ما از ترانزیستور های با جریان زیاد و توان بالا استفاده خواهیم کرد. این ترانزیستور ها بهره جریان خیلی خوبی دارند و با توان زیادی کار می کنند.
در کل، ما از 4 ترانزیستور مختلف، 2 ترانزیستور PNP و 2 ترانزیستور NPN استفاده می کنیم.
2 نوع ترانزیستور مورد استفاده ما، ترانزیستور های TIP107 PNP و ترانزیستور های TIP102 NPN هستند. این ها ترانزیستور های دارلینگتون هستند که می توانند توان بالای خروجی را تحمل کنند. از آنجا که موتور ها به جریان خوبی حدود 75 میلی آمپر یا بیشتر نیاز دارند، ما یک ترانزیستور با توان بالا می خواهیم. موتور ها چندین برابر بیشتر از خروجی دستگاه که LED گفته می شود، به جریان نیاز دارند. در مورد این ترانزیستور ها بیشتر صحبت خواهیم کرد.
پل های H برای مدار هایی که به عملکرد دو طرفه نیاز دارند مفید است. در غیر این صورت، تنها راه برای کارکرد دو طرفه دستگاه تغییر دستی قطب های دستگاه است که پل H این نیاز را برطرف می کند.
بنابراین، می توان از پل H برای هر نوع دستگاه دو طرفه استفاده کرد که باتوجه به اینکه کدام پایه به برق متصل باشد، در جهت مخالف کار می کند که بیشتر برای موتور ها مورد استفاده قرار می گیرد، اما می تواند برای دستگاه های دیگر نیز باشد.
قطعات ساخت پل h با ترانزیستور
- 2 ترانزیستور PNP TIP107 / 127
- 2 ترانزیستور TIP102 / 120 NPN
- 4 مقاومت 1KΩ
- 2 مقاومت 5.6KΩ
- موتور DC
از هر دو نوع ترانزیستور NPN یا ترانزیستور PNP می توان استفاده کرد. اما بهتر است که آن ها ترانزیستور هایی با توان بالا باشند، زیرا موتور ها به جریان کافی احتیاج دارند.
ترانزیستور های TIP107 / 127 ترانزیستور های دارلینگتون PNP هستند.
از آنجا که این ترانزیستور ها دارلینگتون هستند، جریان بالایی را فراهم می کنند. آن ها همچنین می توانند توان بالایی را داشته باشند. کلکتور ترانزیستور TIP107 می تواند تا 80 وات برق را تحمل کند، در حالی که TIP127 می تواند تا 65 وات را تحمل کند.
بالاترین میزان مصرف موتور های DC معمولاً 12 ولت است، به این معنی که کلکتور می تواند 6.7A عبور دهد، که موتور چنین مقداری نیاز ندارد زیرا ما به کمتر از 100mA نیاز داریم. بنابراین این ترانزیستور کاملاً بالاتر از همان محدوده توان مورد نیاز ما است.

ترانزیستور های TIP102 / TIP120 ترانزیستور های دارلینگتون NPN هستند.
ترانزیستور های دارلینگتون، بدلیل اینکه جریان بالایی را فراهم می کنند میتوانند وسیله ای با توان بالا مانند موتور را هدایت کنند. ترانزیستور ها می توانند توان بالا را تحملکنند.
شما می توانید از هر دو نوع ترانزیستور NPN یا PNP استفاده کنید. مدار های با توان بالا برای این مدار بهتر هستند، بهرحال شما می توانید ترکیب کنید و ببینید چه چیزی بهتر است و چطور کار می کند.
موتور DC می تواند هر نوعی و با هر ولتاژی باشد. ما از منبع تغذیه 6-12 ولت DC استفاده می کنیم، بنابراین حداکثر درجه بندی موتور باید 12 ولت باشد. معمولا، موتور های DC بالاتر از 12 ولت درجه بندی نمی شوند، بنابراین می توانید تقریباً از هر موتوری استفاده کنید.
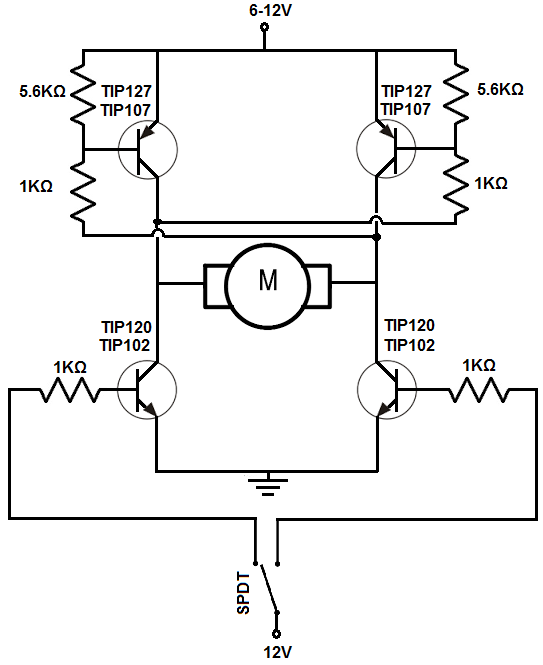
مدار پل H با ترانزیستور
مدار پل H که با 4 ترانزیستور دو قطبی خواهیم ساخت در زیر نشان داده شده است.
برد بورد مدار بالا در زیر نشان داده شده است.

بنابراین اولین کاری که باید انجام شود، تنظیم توان بالا برای مدار است. مدار از 6 تا 12 ولت کار می کند، بنابراین می تواند هر نوع موتور را راه اندازی کند. اگر از موتور DC دارای ولتاژ بسیار پایین مانند 3 ولت استفاده می کنید، می توانید از ولتاژ پایین تری استفاده کنید.
مدار به صورت دستی از طریق یک سوئیچ دو حالته تک قطبی (SPDT)، یک سوئیچ ضامن کنترل می شود.
پایه بیس ترانزیستور ها با ولتاژ مثبت تغذیه می شود. ترانزیستوری که ولتاژ مثبت می گیرد روشن می شود و ترانزیستور در طرف دیگر می چرخد.
بنابراین، اگر ترانزیستور سمت چپ را روشن کنیم، جریان از سمت راست منبع تغذیه از طریق ترانزیستور در بالا سمت راست، از طریق موتور DC از راست به چپ و سپس از ترانزیستور چپ به زمین جریان می یابد.
اگر کلید ضامن را به سمت دیگر برگردانیم، ترانزیستور پایین سمت راست روشن می شود. این ترانزیستور را در بالا در سمت چپ روشن می کند. جریان از منبع تغذیه، از طریق چپ ترین ترانزیستور در بالا، از طریق موتور DC، از چپ به راست و از سمت راست ترانزیستور و پایین به زمین جریان می یابد.
بنابراین، مدار به عنوان یک پل H عمل می کند.
اگر سوئیچ به یک طرف چرخانده شود، موتور در یک جهت می چرخد.
اگر سوئیچ به سمت دیگر چرخانده شود، موتور در جهت دیگر می چرخد.
بنابراین مدار می تواند به دو طرفه بودن موتور، همانطور که یک پل H نیاز دارد، برسد.
به طور معمول، ما دیود ها را با بایاس معکوس در سراسر ترانزیستور ها قرار می دهیم. این دیود ها باعث می شوند ولتاژ های گذرا که توسط سیم پیچ های موتور ایجاد می شوند، کم شوند و به اجزای موجود در مدار ها آسیب نرسانند. وقتی ترانزیستور کار را متوقف می کند، می تواند سنسور های معکوس ولتاژ گذرا ایجاد کند که می توانند بزرگ باشند. برای جلوگیری از آن ها، دیود های بایاس معکوس مانع از ادامه این ولتاژ گذرا به قسمت های دیگر مدار می شوند. از آنجا که ما در حال روشن و خاموش کردن ترانزیستور ها با چرخاندن کلید هستیم، شما باید در برابر EMF محافظت کنید.
از سوئیچ SPDT برای کنترل دستی استفاده می شود تا نحوه کار مدار را نشان دهد. این سوئیچ عالی است زیرا فقط به یکی از ترانزیستور های NPN اجازه می دهد تا در هر زمان روشن باشند. هر دو ترانزیستور نمی توانند به طور همزمان روشن باشند زیرا هر دو ترانزیستور جریانی مخالف هم دارند. بنابراین باید از آن جلوگیری شود که سوئیچ SPDT از این حالت جلوگیری می کند.
مدار همانطور که هست، هرگز خاموش نخواهد شد مگر اینکه منبع تغذیه قطع شود، زیرا SPDT فاقد سوئیچ است که هر دو ترانزیستور در آن زمین شده اند. برای مقابله با این، می توانید سوئیچ را به منبع تغذیه اضافه کنید تا در صورت تمایل، منبع تغذیه از مدار جدا شود.
اگر نمی خواهید مدار بصورت دستی توسط سوئیچ کنترل شود، می توانید سوئیچ SPDT را برداشته و در عوض پایه ترانزیستور های NPN را به هر دستگاهی که می خواهید آن را کنترل کنید، مانند میکروکنترلر وصل کنید. شما هنوز مقاومت های 1KΩ را در بیس نگه دارید.
نکته دیگر این است که این مدار، موتور DC را بر روی یک سرعت قرار می دهد. برای تغییر سرعت، به جای وارد کردن ولتاژ DC ثابت به پایه ترانزیستورها، سیگنال مدوله شده پهنای پالس به بیس اعمال می شود. در این مقاله به این موضوع وارد نمی شویم که برای دستیابی به یک سرعت مشخص به چه مقدار از سیگنال PWM نیاز دارید، اما می توانید این روش را برای تغییر سرعت موتور DC در نظر بگیرید. این یک روش بسیار کارآمدتر از استفاده از پتانسیومتر برای تغییر سرعت است زیرا پتانسیومتر باعث اتلاف زیاد انرژی می شود، اما بازهم می توانید از آن استفاده کنید.
بنابراین اینگونه می توان با استفاده از ترانزیستور مدار پل H را ساخت.






با تشکر. بنده به pwm آشنایی دارم سوالم اینه که اگر از طریق آردوینو سیگنال pwm به سمت ترانزیستور فرستاده بشه با تغییر ولتاژ پایه بیس اتوماتیک جریان عبوری از امیتر به سمت کلکتور هم تغییر میکنه یا اینکه این مدار رو باید برای اون کمی تغییر بدیم. چون موقعی داریم مقاومت ها رو حساب میکنیم بنا به ولتاژ اعمالی به پین بیس یا کلکتور اون رو حساب میکنیم حالا موقعی این ولتاژ داره متغیر میشه قضیه محاسبه مقاومت چی میشه؟ بعد یه سوال دیگه موازی موتور نمیخواد یه دیود بزاریم؟
سلام,بسیار از آموزش خوبی که گذاشتید سپاسگذارم,اگر بشه این رو هم توضیح بدید که اگر بخوایم به آردوینو وصلش کنیم و با pwmکنترلش کنیم چکار باید کنیم خیلی عالی میشه,در ضمن اگر اعداد پیش فرضی که از روی اونها مقاومت ها رو حساب کردید میزاشتید برای درک بهتر مطلب کمک شایانی میکرد
سلام جناب، خوشحالم که براتون مفید واقع شده. قسمت پروژه های آردوینو سایت رو مشاهده کنید بهتون کمک زیادی میکنه.