
کوادکوپتر چیست؟ معرفی کامل کواد کوپتر ها

کوادکوپتر یا “مولتی موتور” یک وسیله مکانیکی دارای چهار موتور و پَره است. کوادکوپتر ها میتوانند سه، شش یا هشت موتور داشته باشند اما اصل کارشان با کوادکوپتر (چهار موتور) یکی است. در کوادکوپتر ها دو موتور در جهت عقربه های ساعت میچرخند و دو موتور در خلاف جهت عقربه های ساعت میچرخند. کواد کوپتر ها از نظر ایرودینامیکی بسیار ناپایدار هستند. یعنی برای انجام دادن دستورات ورودی شما، سرعت موتور ها را تغییر میدهند. شما برای کنترل کوادکوپتر ها به فلایت کنترل نیاز دارید.
پیشنهاد میکنم آموزش ساخت کوادکوپتر را نیز بخوانید.
کواد کوپتر چیست؟
کوادکوپتر از نظر نحوه تولید نیرو برای بالارفتن و همچنین از نظر کنترل با هلی کوپتر ها یا هواپیما های بال ثابت (معمولی) متفاوت هستند. در هواپیما بال ها عملیات بالا بردن را انجام میدهند اما کوادکوپتر ها برای بالا رفتن از ملخ های متصل به موتور استفاده میکنند. یک هلی کوپتر از موتور اصلی خود برای تولید نیروی بالا بردن استفاده میکند.

کواد کوپتر چیز جدیدی نیست و طراحی کوادکوپتر ها به دهه های 1920 تا 1930 برمیگردد. اما کواد کوپتر های قدیمی به خوبی الان نبودند، آنها برای کنترل به خلبان نیاز داشتند و هیچ ثباتی در کار آشنا مشاهده نمیشد. پیشرفت های روز افزون در زمینه فناوری های الکترونیکی و علوم فیزیکی باعث شده است کوادکوپتر ها پیشرفته تر از همیشه ظاهر شوند. کوادکوپتر های جدید دارای ریزپردازنده، باتری، شتاب سنج، سیستم های gps و… هستند. در ساده ترین حالت از کوادکوپتر ها میتوان برای سرگرمی و ضبط فیلم و عکس استفاده کرد.
کنترل کننده کوادکوپتر
یک کوادکوپتر معمولی با یک کنترلر 4 کاناله ارائه می شود که دستوراتی را به آن ارسال می کند تا دریچه تا در عملکرد آن تغییر ایجاد کند. فرکانس ارتباطی مورد استفاده بیشتر کنترل کننده ها 2.4 گیگاهرتز است. این فرکانس بسیار معمولی است و اغلب برای اتصالات WiFi استفاده می شود. ممکن است تداخلی بین امواج وای فای با کنترل کننده ها بوجود بیاید اما بسیار کم این اتفاق رخ میدهد.
کنترلر ها دارای 4 دکمه trim هستند که با استفاده از آنها میتوانید اصلاحات جزئی در رفتار کوادکوپتر خود ایجاد کنید. 
ملخ (پره موتور ها)
همیشه یادتان باشد، دو ملخ در جهت عقربه های ساعت و دو ملخ در خلاف جهت عقربه های ساعت میچرخند. سطح زیرین دو ملخ متفاوت است. بنابراین اگر تصمیم بگیرید همه ملخ ها را مشابه هم بگذارید، کوادکوپتر به جای بالا رفتن پایین میرود. در این حالت نیرو رو به پایین ایجاد میشود و در نتیجه باعث سرنگونی کوادکوپتر شما میشود. وقتی میخواهید پره ها را تعویض کنید، حتما به جهت آن ها و محل قرارگیری آن ها دقت کنید.





دینامیک کواد کوپتر
چهار نیروی اصلی وجود دارد که بر کوادکوپتر اثر میکنند:
- جاذبه – نیرویی است که کوادکوپتر را به دلیل جرم آن به سمت زمین میکشد.
- بالابر – این نیروی رو به بالا در کوادکوپتر ناشی از ملخ ها است.
- رانش – این نیروی واکنش افقی در کوادکوپتر ناشی از ملخ ها است.
- کشیدن – تصور کنید که در اتومبیل هستید ، و دست خود را از پنجره بیرون می کشید. هوایی که به دست شما برخورد می کند سعی دارد به عقب برود.

معلق بودن کواد کوپتر
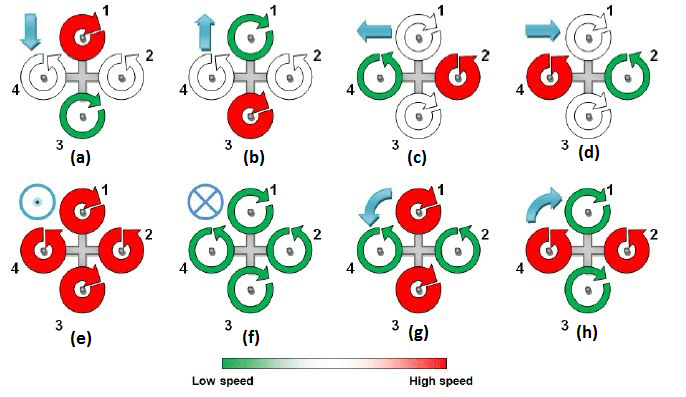
معلق بودن زمانی رخ میدهد که نیروی بالا بر با نیروی جاذبه زمین برابر باشد. در این حالت یک وضعیت نسبتا خنثی در نیرو های وارد شونده به کوادکوپتر ایجاد میشود و آن را در هوا معلق میکند. برای بالا بردن کوادکوپتر، باید نیروی بالا بر بیشتر از نیروی جاذبه باشد که این کار با بالا بردن سرعت هر 4 موتور انجام میشود. برای پایین آوردن کواد کوپتر خلاف این عملکرد انجام میشود. یعنی نیروی بالا برنده کمتر از نیروی جاذبه زمین است و این کار با پایین آوردن سرعت هر 4 موتور انجام میشود. معمولی با بالا و پایین بردن جوی استیک روی کنترلر، بالا رفتن و پایین آمدن کوادکوپتر تنظیم میشود.
برای حرکت کوادکوپتر به جلو، چپ، راست و عقب، باید زاویه نیرو های بالا بر را تغییر بدهیم. یعنی باید زاویه موتور ها را تغییر بدهیم.
کوادکوپتر چگونه حرکت میکند؟
برای حرکت کوادکوپتر، ما باید با جوی استیک های موجود روی کنترل کننده کار کنیم. برای حرکت کوادکوپتر رو به جلو، سرعت موتور های جلو کم میشود و سرعت موتور های عقب زیاد میشود. برای حرکت رو به عقب برعکس این کار انجام میشود. یعنی سرعت موتور های جلو افزایش میابد و سرعت موتور های عقب کاهش میابد.
برای حرکت کوادکوپتر به چپ و راست، یک تغییر مشابه حرکت به جلو و عقب در سرعت موتور ها اتفاق می افتد ، اما این بار در ملخ های چپ و راست است. بنابراین فقط کافیست سرعت موتور ها را تغییر دهیم تا نیروی بالابر را به سمت مورد نظرمان هدایت کنیم.


جلوگیری از انحراف مسیر کواد کوپتر
آیا تا به حال فکر کرده اید که چرا یک موتور در انتهای هلی کوپتر ها وجود دارد؟ این موتور انتهای از انحراف مسیر و چرخش بدنه هلیکوپتر جلوگیری میکند. اگر موتور و پره های هلی کوپتر در خلاف جهت عقربه های ساعت بچرخند، به دلیل واکنش گشتاور، بدنه هلی کوپتر نیز در جهت عقربه های ساعت میچرخد. این همان قانون سوم نیوتن است. وجود یک موتور در انتهای هلی کوپتر از انحراف مسیر و چرخش بدنه جلوگیری میکند.
در کوادکوپتر ها اگر هر چهار ملخ دارای یک شکل چرخش باشند، بدنه کوادکوپتر برعکس میچرخد. اما چرا این اتفاق نمی افتد؟ به خاطر برعکس بودن ملخ های موتور های عقب! این مسئله باعث میشود حالتی متعادل بوجود بیاید و در مسیر حرکت کوادکوپتر تداخل ایجاد نشود.
فلایت کنترل

کوادکوپتر با تغییر سرعت هر موتور پرواز کرده و حرکت می کند. بنابراین وقتی جوی استیک ها را روی کنترلر خود تکان میدهید، باید این دستورات به زبان مناسب برای کوادکوپتر تبدیل شود. فلایت کنترل وظیفه هماهنگی هر چهار موتور را دارد. همچنین فلایت کنترل ها میتوانند به دستگاه ها و سنسور های مختلف متصل شوند. در کوادکوپتر های پیشرفته، فلایت کنترلر میتواند یک ارتباط دوطرفه ایجاد کند.





سلام ایا میشه با ic ats304 r ats306t پهباد ساخت چون تعدادی از این اسی موجود دارم من مشتری اشتراکی شما هستم