
ساخت کوادکوپتر با آردوینو (آموزش کامل و فلایت کنترل)

اگر دوست دارید یک کوادکوپتر بسیازید اما نمیدانید از کجا شروع کنید، این مقاله مناسب شما است. ساخت کوادکوپتر بسیار دشوار و وقت گیر است اما در این آموزش ما به صورت مرحله به مرحله نحوه ساخت یک کوادکوپتر با برد آردوینو را توضیح میدهیم.
ساخت کوادکوپتر در خانه کاری طولانی است. بنابراین اگر صبر و شکیبایی ندارید، از کیت های آماده استفاده کنید. اما اگر بر طبق این آموزش خودتان به طور کامل یک کوادکوپتر حرفه ای را بسازید، احساس رضایت بسیار زیادی را بدست می آورید. در فیلم زیر یک نمونه کوادکوپتر ساخته شده با آردوینو را مشاهده میکنید.
در اینجا ما بر روی ساخت یک کوادکوپتر تمرکز میکنیم. بنابراین اگر میخواهید بدانید یک کوادکوپتر چیست و چطور کار میکند، در ابتدا حتما مقاله کواد کوپتر چیست را بخوانید.
قطعات مورد نیاز برای ساخت کوادکوپتر با آردوینو
در این قسمت توضیحاتی کوتاه راجع به قطعاتی که برای این کوادکوپتر نیاز داریم را بررسی میکنیم.
- فریم: فریم یا قاب همان ستون فقرات کوادکوپتر است! فریم تمام قسمت های کوادکوپتر ما را در کنار هم نگه میدارد. فریم باید سبک باشد اما از استحکام مناسبی نیز برخوردار باشد. تمام موتور ها، باتری ها و … بر روی فریم سوار میشوند.
- موتور: موتور ها هوا را با سرعت بالا منتقل میکنند که باعث میشود کوادکوپتر حرکت کند. هر کدام از موتور ها توسط یک ESC یا همان کنترل کننده سرعت، کنترل میشوند. در کوادکوپتر ها از موتور براشلس استفاده میشود.
- ESC: کنترل کننده سرعت الکترونیکی، مانند عصب در بدن ما عمل میکند. ESC ها میزان برق موتور ها را تعیین میکند که باعث تعیین جهت سرعت حرکت کوادکوپتر میشود.
- ملخ: بسته به نوع کواد کوپتری که می سازید، می توانید از ملخ های 9 تا 10 یا 11 اینچی (برای پروازهای ثابت و عکاسی هوایی) استفاده کنید. حتی میتوانید از ملخ های 5 اینچی نیز برای کاربرد های ساده استفاده کنید.
- باتری: بسته به میزان ولتاژ مورد نیاز، میتوانید از باتری های 2S ، 3S ، 4S یا حتی 5S استفاده کنید. اما برای استاندارد شما از باتری 3S 11.4V میتوانید استفاده کنید. اگر سرعت بالا میخواهید میتوانید از باتری های 4S استفاده کنید.
- برد آردوینو: از برد آردوینو به عنوان مغز این پروژه استفاده میشود. در مورد انتخاب برد مناسب در ادامه صحبت خواهیم کرد.
- IMU: بردی است که به کمک سنسور های روی آن به کوادکوپتر شما کمک میکند.
- کنترلر RC: دسته کنترل کننده است که برای کنترل کردن کوادکوپتر استفاده میشود.
1. فریم کوادکوپتر
برای قسمت فریم، شما میتوانید خودتان این فریم را بسازید یا از فریم های آماده استفاده کنید. توجه داشته باشید که فریم شما باید دارای قسمت های نصب وسایل الکتریکی، چهار بازو برای قرار دادن ملخ ها و چهار محل برای نصب موتور ها باشد.

این قاب می تواند از آلومینیوم ، الیاف کربن یا چوب ساخته شود اما ماده ای که بیشتر برای بازوها استفاده می شود آلومینیوم است. آنها نسبتاً سبک ، سفت و سخت و ارزان هستند. اما میتوانند باعث ایجاد خطا در سنسور ها شوند.
فیبر کربن خیلی بهتر لرزش موتور ها را جذب میکند و سفت و سخت تر است. اما از همه انواع فریم ها گرانترین نیز هست. فیبر کربن گزینه برتر است ، اما این خیلی به بودجه شخصی شما بستگی دارد.
تخته های چوبی لرزش موتور را به خوبی جذب میکنند اما به راحتی میشکنند.
2. موتور براشلس برای کواد کوپتر
موتور های براشلس تقریبا شبیه به موتور های DC معمولی هستند. اما دارای ویژگی های خاصی هستند که استفاده از آن ها را برای کوادکوپتر ها بسیار مناسب میکند. جهت کسب اطلاعات بیشتر مقاله موتور براشلس را بخوانید. در این موتور ها میتوانید بدانید که با چه میزان برق، موتور چند دور در دقیقه میچرخد. همچنین موتور های مورد استفاده ما باید بتوانند هم در جهت عقربه های ساعت، و هم در خلاف جهت عقربه های ساعت بچرخند.

موتور براشلس ها نیروی مورد نیاز برای چرخش ملخ ها را ایجاد میکنند. همچنین مقاله کنترل موتور براشلس با آردوینو را مشاهده کنید.
3. ملخ های کوادکوپتر
ملخ های کوادکوپتر رانش مورد نیاز را ایجاد میکند. هر ملخ برای چرخش به یک موتور نیاز دارد. حتما توجه کنید که ملخ سبک و دارای استحکام کافی را خریداری کنید. ملخ ها (پروانه ها) در اندازه های مختلف موجود هستند و با توجه به پروژه خود میتوان نوع مناسب را انتخاب کنید.

ابتدا فریم را خریداری کنید و ملخ های مناسب با آن را انتخاب کنید. توجه داشته باشید هرچقدر قطر بیشتر باشد، ملخ رانش بیشتری ایجاد میکند و در نتیجه به برق بیشتری احتیاج دارد اما میتواند وزن بیشتری را بلند کند. برای موتور های دور بالا شما باید از ملخ های کوچک استفاده کنید. برای موتور های دور پایین شما به ملخ های بزرگتر نیاز دارید تا بتوانید با سرعت کمتر، کوادکوپتر را در هوا نگه دارید. اگر می خواهید یک کوادکوپتر قدرتمند برای بلند کردن تجهیزات فیلمبرداری و عکاسی بسازید، باید از موتوری با دور کمتر و گشتاور بیشتر و ملخ های بلندتر استفاده کنید.


4. ESC (كنترل كننده سرعت الکترونیکی)
دستگاهی که وظیفه کنترل سرعت موتورها را بر عهده دارد یک برد کنترل کننده ارزان قیمت است که فقط برای موتور ها استفاده می شود. هر ESC یک ورودی برای یک باتری دارد و دارای یک خروجی موتور با سه فاز است. هنگام خرید ESC، به سطح جریان الکتریکی خروجی آن توجه کنید. پیشنهاد میشود ESC را با حداقل جریان 10 آمپر خریداری کنید.
همچنین توجه کنید که ESC شما چه امکاناتی را دارد. بعضی از ESC ها به شما این امکان را میدهند که دامنه و فرکانس را با توجه به نیاز خود تنظیم کنید.
5. باتری
پیشنهاد همیشگی برای انتخاب باتری کوادکوپتر، لیتیوم پلمیر است. باتری های لیتیوم پلیمری سنگین نیستند و جریان خروجی بسیار مناسبی را ارائه میدهند. باتری های LiPo به صورت تک سلول 3.7 ولتی یا به صورت یکجا بسته بندی می شوند (حداکثر 10 سلول 37 ولت را تأمین می کنند). محبوب ترین نسخه در میان علاقه مندان به هواپیماهای بدون سرنشین باتری 3SP1 شناخته می شود که دارای سه سلول است و 11.1 ولت را فراهم می کند.

6. IMU (واحد اندازه گیری اولیه)
این واحد وظیفه اندازه گیری سرعت و نیروی گرانش چهارگانه را دارد. این امر به الکترونیک اجازه می دهد تا مقدار توان ارسال شده به موتور ها را کنترل کند تا سرعت موتور ها را تنظیم کند. این واحد مجهز به ژیروسکوپ 3 محوره و شتاب سنج 3 محوره است. این ترکیب به عنوان 6DOF IMU شناخته می شود.
ژیروسکوپ برای خواندن مقادیر سرعت زاویه ای وجود دارد و از شتاب سنج برای اندازه گیری شتاب و نیروی گرانش استفاده میشود.
7. فلایت کنترل با آردوینو
برای ساخت فلایت کنترل میتوانید از برد های آماده استفاده کنید که دقیقا برای کوادکوپتر ها ساخته شده اند. اما در این آموزش ما میخوایم فلایت کنترل را با آردوینو طراحی کنیم. با استفاده از برد آردوینو اونو و انتخاب قطعات مناسب، ما یک فلایت کنترل (کنترل کننده پرواز) حرفه ای برای کوادکوپتر خود طراحی میکنیم.

برنامه نویسی برد های آردوینو ساده است اما میتوانید انواع پروژه های مختلف را با آنها طراحی کنید. جهت کسب اطلاعات بیشتر، بخش آموزش آردوینو را مشاهده کنید.
8. کنترلر RC
متداول ترین روش برنامه نویسی و کنترل کوادکوپتر استفاده از فرستنده RC است. معمولاً می توانید حالت آکروباتیک (Acrobatic) یا پایدار (Stable) را انتخاب کنید. در حالت آکروباتیک، ژیروسکوپ مقادیر را به پردازشگر میفرستد، در این حالت جوی استیک ها فقط برای کنترل و تنظیم سرعت وجود دارند و اگر آنها را رها کنید، کوادکوپتر در حالت متعادل نگه داشته نمیشود. این حالت برای مبتدیان مناسب نیست زیرا کوادکوپتر به راحتی کج میشود و کنترل آن سخت است.

بنابراین اگر مبتدی هستید، از حالت پایدار استفاده کنید. در این حالت از سنسور ها برای متعادل سازی حرکت پهپاد استفاده میشود. امروزه سیستم های کنترل RC مختلفی وجود دارد ، مانند Futaba ، Spektrum ، Turnigy ، FlySky و …
مدار کوادکوپتر با آردوینو
این پیچیده ترین قسمت در مراحل ساخت کوادکوپتر با آردوینو است. لحیم کاری یک تکنیک بسیار خاص است، بنابراین حتماً این فرآیند را با دقت انجام دهید. در این قسمت به قطعات زیر نیاز داریم:
- آردوینو NANO یا UNO
- ماژول MPU-6050
- مقاومت 330 اهم
- LED
- ماژول بلوتوث HC-05
- برد سوراخدار
- سیم نازک
خرید ماژول بلوتوث اختیاری است.
تصویر زیر شماتیک اتصالات قسمت کنترل کوادکوپتر با آردوینو را نشان میدهد:
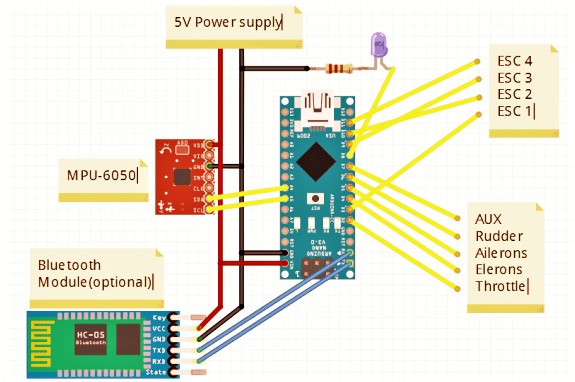
نحوه اتصال ESC ها:
- سیگنال پین ESC 1 – D3
- سیگنال پین ESC 3 – D9
- سیگنال پین ESC 2 – D10
- سیگنال پین ESC 4 – D11
نحوه اتصال ماژول بلوتوث:
- Tx – Rx
- Rx – Tx
نحوه اتصال MPU-6050:
- SDA – A4
- SCL – A5
نحوه اتصال LED:
- پایه آند LED – D8
نحوه اتصال گیرنده:
- Throttle – 2
- Elerons – D4
- Ailerons – D5
- Rudder – D6
- AUX 1 – D7
پایه های GND مازول MPU-6050 ، ماژول بلوتوث ، گیرنده و ESC را به پین GND آردوینو متصل کنید.
پروگرام فلایت کنترل در برد آردوینو
برای ساخت فلایت کنترل به برنامه نویسی توسط کامپیوتر / لپتاپ احتیاج داریم. ابتدا باید فایل MultiWii 2.4 را بارگیری کنید. سپس آن را اکسترکت کنید.
وارد پوشه MultiWii شوید و به دنبال فایلی با نام MultiWii و فرمت .ino بگردید و آن را اجرا کنید.
بعد از اینکه آن را توسط نرم افزار Arduino IDE باز کردید، تب های زیادی مثل Alarms.cpp, Alarms.h, EEPROM.cpp, EEPROM.h را مشاهده میکنید. به دنبال فایل config.h بگردید.

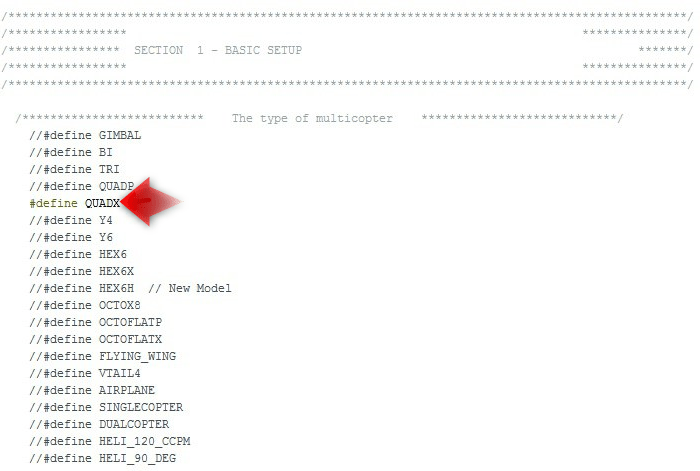
سپس به پایین بروید، و خط زیر را پیدا کنید و سپس // را حذف کنید تا مانند تصویر زیر بنظر برسد.
باز هم به پایین بروید و نوع IMO خود را پیدا کنید و // را حذف کنید. به طور مثال ما از GY-521 استفاده کردیم بنابراین باید مانند زیر بنظر برسد.

اگر تصمیم دارید سنسورهای دیگری مانند فشارسنج یا حسگر اولتراسونیک را اضافه کنید، تنها کاری که باید انجام دهید این است که آنها را در اینجا “فعال” کنید.
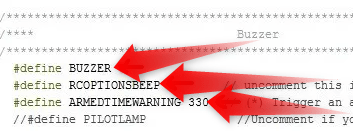
مرحله بعد پین Buzzer است:

در آنجا ، باید گزینه های Flight indicator (3 گزینه اول) را فعال کنید:
اکنون ، باید کد را به آردوینو خود فلش کنید. برد خود از فلایت کنترل جدا کرده و آن را به رایانه خود متصل کنید. به منوی Tools بروید و در قسمت Boards نوع برد آردوینو خود را انتخاب کنید. به طور مثال ما اینجا آردوینو NANO را انتخاب کردیم.
اکنون “Port Serial” را پیدا کرده و پورت COM را که Arduino Nano به آن متصل است فعال کنید (در مورد ما COM3).
در نهایت روی دکمه آپلود کلیک کنید. پس از آپلود کد، آردوینو را از رایانه جدا کنید و اتصالات را مثل قبل انجام دهید. صبر کنید تا چراغ روی برد آردوینو روشن شود. حالا آردوینو را به رایانه متصل کنید.
اکنون ، پوشه Multiwii 2.4 و سپس MultiwiiConfig را پیدا کرده و پوشه سازگار با سیستم عامل خود را پیدا کنید. در مورد ما، “application.windows64” است. سپس فایل MultiwiiConf را باز کنید. پس از باز شدن رابط کاربری ، باید پورت COM Arduino خود را انتخاب کرده و مانند تصویر زیر بر روی Start کلیک کنید.
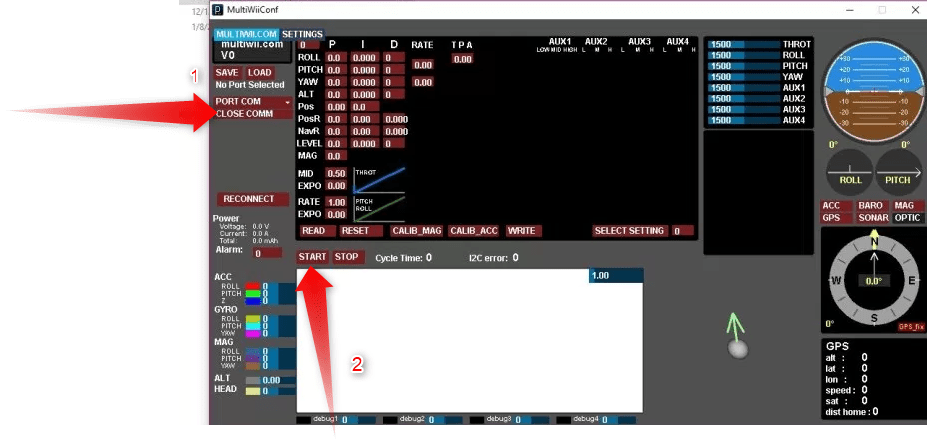
حالا به راحتی اطلاعات سنسور ها و … را در این صفحه مشاهده میکنید. تبریک میگویم شما به راحتی میتوانید با حرکت دادن جوی استیک ها کوادکوپتر خود را کنترل کنید و اطلاعات را در کامپیوتر خود مشاهده کنید.







سلام ایا میشه کنترل کوادکوپتر با رادیو کنترل اردوینو بزارید با ریموت ساختگی با اردوینو باشه
حتما در آینده
یه سوالی داشتم منظورتون از elerons همونElevators هستش ؟ اگه نیست چیه ؟
سلام فایل کامل این پروژه رو از کجا دانلود کنم
سلام عزیز
در انتهای مطلب
استاد بزرگوار ازتون سوال داشتم خواستم عرض کنم که ایا با این قطعات میشه کواد کوپتر ساخت یا نه ۴عدد موتور براشلس راست گرد و چپ گرد و برد اسپید کنترل و سنسور هشدار دهنده مانیتورنیگ برای افت ولتاژ و باتری لیتیومی و پیلمر و بدنه ابر فرایم و ۴عدد ملخ برد kk2 1.5 برای تعادل پرنده و یه برد هم برای تعادل پرنده MPU6050 استاد ممنون میشم که جواب سوالات منو بدین سپاس
سلام عزیز، بله، با مجموعه قطعات مذکور امکان ساخت کوادکوپتر وجود دارد. تنها نکته این است که برد KK2.1.5 خود دارای سنسور تعادل بوده و نیازی به استفاده جداگانه از MPU6050 نیست. همچنین باید از سازگاری ولتاژ و جریان موتور، ESC و باتری اطمینان حاصل شود.
سلام ، یعنی در این مدار ریموت آر سی به ماژول بلوتوث فرمان میدهد؟ چطوری بایند میشوند؟
درود وقتتون بخیر ، میخوام بجای کنترلر RC از دسته کنسول بازی برای کنترلش استفاده کنم و اینکه بجای کوادکوپتر ، هلیکوپتر دارم ،تعداد موتور هاش 3 عدد هستش
ممنون میشم راهنماییم کنین
سلام
برای گیرنده پنج سیم هست
میشه بگید هر کدام برای چیه
سلام ببخشيد سوالي داشتم ازتون اين مدار و كنترل راديو نيست فقط مدار گيرنده هست ميتونيد كاملش رو براي ما بفرستيد با برنامه نويسيش و توضيحاتش بعدش اين ميشه بهعنوان برنامه هواپيما استفاده كرد از برنامه نويسيش
سلام
فایل Mutiwii رو دانلود کردم ولی ارور زیر رو میده:
could not find the main class.program will exit
سلام مهندس
میخوام یه بیسیم درست کنم برای یه پروژه
با آردوینو میشه توضیح بدین مراحل کارو
من در اون مراحل ساخت بیسیم خود مجموعتون هم مطالعه کردم ولی یکم مطالب گنگ بود . میخوام بیسیم م چند کیلومتر رو پوشش بده از ماژول های بیسیم از ماژول E32ttl 1w
هم تحقیق کردم میشه این کارو کرد میشه راهنماییم کنید که با استفاده از آردوینو وE32ttlو.. بسازم .ممنون
+من خودم دوره آردوینو شما رو دارم
سلام وقت بخیر ببخشید امکانش هست فایل مولتی وای فای رو بارگذاری کنید چون هر کاری میکنم دانلود نمیشه
سلام مجدد آیا ساخت رادیو کنترل و گیرنده با هم آموزش داده شده
سلام و عرض ادب. ممنون از اینکه مطالب مفیدی قرار دادین.
سوالم اینکه میشه با برد اردینو و تمام سنسورها لازم موجود . فلایت کنترل پایدار. همانند پیکس هاوک که بشه کارهای تجاری (کشاورزی. . نقشه برداری)انجام بده. ساخت؟
چون برد اردینو خیلی بصرفه تر هست و تو بازار زیاد هست متشکرم .
سلام و تشکر از آموزشهای خوبتون .
یک سوال داشتم میشه بگویید که اسپید کنترل ها سه تا سیم دارد یک لین اون رو به آردوینو متصل کنیم و دو تا لین مثبت و منفی دیگر آنرا در کجا متصل کنیم .
باز هم تشکر از معلومات مفید تان
با سلام و تشکر از آموزشهای خوبتون و اینکه دلسوزانه دارید تلاش میکنید برای به اشتراک گذاشتن اطلاعاتتون.
میخواستم ببینم برا کوادکوپتر با آردوینو ممکنه دوره آموزشی بذاربد که تو ویدیو هم توضیح داده شده باشه…
سلام عزیز
خوشحالم که مطالب رضایت داشتین
سعی میکنیم آموزش کامل تری باید ساخت کواد کوپتر آماده کنیم.
سلام خسته نباشید
من یک عدد فرستنده رادیو کنترل ۲.۴ گیگا هرتز ۴ کاناله دارم ولی گیرنده فلایت کنترل را گم کردم آیا میشه با همین رادیو کنترل برد گیرنده دیگری را مچ کرد ؟
متشکرم
سلام عزیز
باید بررسی کرد آیا قابلیت مچ شدن با موارد دیگر را دارد یا خیر به مدل دستگاه شما بستگی دارد
سلام، واسه ساخت یک کوادکوپتر کامل به همراه ریموت، چقدر باید هزینه کنیم؟
سلام با تشکر از سایت خوبتون
میخاستم بدونم من یه ماژول GY-NEO-6MV2 دارم میخاستم کانفیگ کنم رو Arduino Uno که باهاش فلایت کنترل ساختم ((((((سوالم اینه توی کد multiwii کجا رو باید فعال کنم
و اتصال ماژول به آردوینو بهم بگید ممنونم )))))
سلام ببخشید لینک دانلود multiwii کجای سایت هست پیداش نمی کنم
سلام عزیز
در مطلب زیر تصویر مدار تقریبا
سلام، برای ساخت یک کواد کوپتر با 4 تا موتور، چندتا اسپید کنترل باید داشته باشیم؟
و ابن تعداد برای موتور براشل یا کروسل متفاوت است؟
سلام ممنون از مطالب خوبتون من یه قسمتی رو خوب متوجه نشدم بعد این که اردینو روبرنامه نویسی کردیم چطوری جوی استیک کار میکنه یا چطور به اردینو متصلش کنیم?
سلام عزیز
برای یادگیری برنامه نویسی آردوینو و اتصال جوی استیک میتونید دوره آموزش آردوینو را مشاهده کنید.
سلام خیلی ممنون از مقاله خوبتوون میخواستم ببینم مقاله ای هم هست که بشه پروزه رو باAVRدرست کرد ولی از صفرتا صدر برای تحول پروزه مدرسه میخاستم استفاده کنم .
ینی در حدی میخاستم که حتی برنامه نویسیش هم داخل مقاله باشه اگر کسی سایتی سراغ داره ممنون میشم بهم بگه .
سلام من میخواهم این کوادکوپتر رو بسازم ولی دوربین دار میشه بگید چطور دوربین دارش کنم
سلام عزیز
مقاله راه اندازی دوربین با آردوینو رو مشاهده کنید.
از esp32 cam هم میتونی استقاده کنی
سلام میتونید اسم دقیق موتور مخصوص برای کواد کوپتر رو بگید
سلام براشلس معمولا موتور های خیلی قوی و با قدرت بلند کردن وزن بالا هستن ولی خیلی گرونن
موتور های کورلس که تو بیشتر کوادکوپتر های امروزی درست میشن هم خوبن ولی اگه حرفه ای میخوای درست کنی براشلس بنداز
سلام وقتتون بخیر ممنون از اموزش مفیدتون. می خواستم بپرسم که سیم aux که به برد وصل کردین چیه و اگر بخوام با NRF و اردوینو رادیو کنترل بسازم مقادیر رو باید به مقدار خاصی مپ کنم یا همون 0 تا 1023 باید باشه؟ لطفا بهم جواب بدید مهندس
سلام .ببخشید میخواستم بگم که ایا میشه این کوادکوپتر رو با موتور کورلس هم درست کرد؟؟
اره ولی درمورد جریان کشی هاش حتما تحقیق کن
سلام و خسته نباشید
این پروژه کوات کوپتر گزاشتید نیازی به کد نویسی نداره یا اگه داره میزارید توی سایت ؟؟
سلام خسته نباشید
آیا تمامی فلایت کنترل ها نیازمند برنامه نویسی اند
و سوال بعدی اینکه میتونیم از طریق اینترنت یک کواد کوپتر رو کنترل کنیم
سلام عزیز
فلایت کننرل انالوگ مناسب نیست و از طریق اینترنت میتونید اما با توجه به تاخیر پیشنهاد نمیشه
سلام بابت مطالب مفیدتون ممنونم.
کار ماژول بلوتوث چیه؟؟؟این ماژول با ایستگاه زمینی ،ارتباط برقرار میکنه؟؟؟بردش چقدره؟؟؟؟
ایستگاه زمینی rcهم دارای یه بلوتوثه؟؟؟؟
یعنی مدل رادیوی این سیستم از نوع بلوتوثیه؟؟؟؟
سلام ممنون بابت اموزش می خواستم ببینم که چطوری رادیو کنترل رو به اردوینیو وصل کنیم
با عرض سلام و خسته نباشید ابتدا میخوام بابت سایت خوبتون واقعا تشکر کنم و از اینکه اینجور دلسوزانه و صادقانه میخواهید سطح دانش کشورمون ایران را بالا ببرید سر تعظیم فرود میارم و یک خسته نباشید خدمت تمام نفراتون عرض کنم.
من میخواستم چندتا از دوره هاتون خریداری کنم چون شدیدا به یادگیری الکترونیک علاقه دارم ولی اونقدری درآمدم بالا نیست که بتونم دوره هاتون خریداری کنم و خواستم ببینم امکان تخفیف دارید تا من هم بتونم از دوره هاتون استفاده کنم.البته میدونم که سایت شما واقعا هم از لحاظ مبلغ فروش دوره هاتون و هم از لحاظ حجم اطلاعات ارائه شده و کیفیت آموزش به هیچ وجه با سایت های مشابه قابل مقایسه نیست و اگر درخواستم هم رد کردید یک ذره از ارزش این کار ارزشمندتون کم نمیشه و منم تلاشم بیشتر میکنم تا بتونم همه دوره های آموزشی بالاخره خریداری کنم.با تشکر
سلام عزیز خوشحالم که آیرنکس براتون مفید واقع شده
برای دریافت تخفیف به پشتیبانی پیام بدید
سلام
من هیچ اشنایی با مباحث اولیه برنامه نویسی، اردینو و غیره ندارم و میخوام یک کوادکوپتر ارزان با فلایت های کنترل ارزان اماده بسازم شما چه وسایلی رو پیشنهاد میکنید؟
سلام عزیز، با توجه به اینکه در مورد Arduino اطلاعی ندارید بهتر هست دوره آموزش آردوینو رو اول از همه مشاهده کنید
سلام میشه به جای ماژول بلوتوث، ماژول وایفای وصل کنیم؟؟؟؟؟؟
سلام عزیز، بله اما نیاز به تغییر کد هست.
سلام من یک سوالی داشتم یعنی اگر که ما برد I M U را به کوادکوپتر متصل کنیم و یک برنامه نویسی جزئی برای روش حرکت بنویسیم دیگر نیاز نیست با جزئیات بگویی که مثلا اینقدر دور موتور های عقب زیاد شود تا ربات به جلو حرکت کند؟
سلام عزیز
در هر صورت نیاز به برنامه نویسی هست
سلام و وقت بخیر
من سجاد عابدی طامه هستم
من یک کوادکوپتر ساختم اما بیشتر از ۱ سانتی متر بالا نرفت
ویژگی هاش
جرمش ۲۰۰ گرم کلا کلا با تمام چیز ها ۲۰۰ گرم
ابعادش از مرکز موتور ها ۱۴.۵۶ در ۱۴.۵۶
تقارن دارد
باتریش ۸۰۰ میلی امپر است
موتور هاش کارلس
من با موتور خالی و پره ای به شعاع ۲.۵ فقط ۱ سانتی متر بلندش کردم
به نظر شما باید از براش لس استفاده کنم
یا از موتور و گیربکس و پره ای به شعاع ۷ سانتی متر استفاده کنم خوبه ؟
اولا به نظرم نسبت به ابعاد کوچیکه پره هات بعد بهتره از چرخ دنده استفاده کنی که دور بالاتری بده چون موتورت نسبتا برای کوات کوپتر کم توان هست
البته اگه براشلس بندازی خوب نیاز به چرخ دنده هم نداری
سلام و عرض ادب
خسته نباشید جناب رحیمی عزیز
امکان این وجود داره که آموزش ساخت فلایت کنترلر رو بدون اردوینو و برد توسعه ای و با خود بیس اصلی اش در سایت قرار بدهید ؟
بسیار تشکر از زحمات شما.
سلام. ممنون از سایت خوبتون
میشه بگید چطور باید رادیو کنترل را روی برد تنظیم کنم
سلام ممنونم از این که جواب سوال من رو دادید
ببخشید بازم سوال میپرسم
میخواستم بدونم که الان اگر بخوام یه رادیو کنترل ۸کاناله بسازم از چه چیز هایی باید روی برد بورد استفاده کنم
بعد اگه میشه این اموزش رو به من بدید که بتونم یه رادیو کنترل ۸ کاناله با برد بورد بسازم اگه بشه ترو خدا خیلی شوق این اموزش رو دارم اگه میشه تا اونجایی که به دستتون میاد به من در یاد گرفتن و انجام دادن این کار کمک کنید ممنون میشم این لطف رو در حق من کنید
سلام جناب، طراحی رادیو کنترل 8 کاناله پیچیده و نیازمند آموزش طولانی هست در آینده سعی میکنم آموزش طراحی رو قرار بدم.
سلام وقت بخیر . من خواستم فایل رو دانلود کنم اما انگار از دسترس خارج شده اگر مقدوره لینک دانلود فایل رو درست کنید تا بتونم دانلود کنم
سلام. من برای ساخت رادیو کنترل به فیبر سوراخ دارنیاز دارم ایا میتونم به جای فیبر سوراخ دار از بردبورد استفاده کنم؟
چون من هیچی بلد نیستم از لحیم کاری و میترسم بزنم اون فیبر سوراخ دار و شاید کل مدار رو خراب کنم.
و سوال بعدی من اینه که اگر میشه روی بردبورد یک رادیو کنترل 8 کاناله انجام بدم از چه چیز هایی میشه انجام داد
لطفا من رو راهنمایی کنید
سلام جناب، بله میتونید از برد بورد استفاده کنید اما توجه داشته باشید استفاده از برد بورد برای طراحی اولیه و نمونه سازی مناسب هست.
سلام ببخشید فایل multiwii از کجای سایت regrops.com که گذاشتین باید دانلود کنیم لینک دانلودش معلوم نیست
سلام
هزینه تخمینی و تقریبی این پروژه چقدر است؟
سلام جناب، هزینه ساخت کوادکوپتر کاملا بستگی به نوع قطعاتی که میخرید داره میتونید حدود 5 میلیون به بالا رو در نظر بگیرید. البته رقمی که خدمتتون گفتم میتونه کمتر و یا بیشتر بشه.