
آموزش کنترل استپر موتور با میکروکنترلر AVR

سلام. کنترل استپر موتور با میکروکنترلر AVR و کامپایلر اتمل استودیو (استپ موتور چیست ؟) را آماده کردیم.
پروژه کنترل استپر موتور با AVR
Stepper Motors (استپر موتور ، استپ موتور ، موتور پله ای) موتورهایی هستند که می توانند در پله ها از 0 تا 360 درجه میچرخند. موتور استپر از سیگنال های الکترونیکی برای چرخش موتور در پله ها استفاده می کند و با هر سیگنال شافت را به اندازه ثابت ثابت (یک پله) می چرخاند. برخلاف سروو موتور ، موتورهای پله ای (استپر) را می توان با استفاده از پین های GPIO میکروکنترلر به جای پین های PWM هدایت کرد و می توانند در (+360) و (-360) بچرخند. ترتیب سیگنال ها جهت چرخش موتور پله را تعیین می کند.
ما قبلا در یک مطلب استپ موتور ها را به صورت کامل بررسی کرده ایم : استپر موتور چیست ؟
در این پروژه AVR ما استپر موتور 28BYJ-48 را به میکروکنترلر Atmega16 AVR با استفاده از Atmel Studio 7.0 متصل میکینم. این موتور پله ای در 5V کار می کند. ما استپ موتور را با میتوانیم با دو درایور موتور یعنی ULN2003 و L293 کنترل کنیم که هر دو با عرضه 5 ولت هدایت می شوند. به منظور ساده تر شدن ما از ماژول پیش ساخته هر دو درایور موتور استفاده می کنیم. همچنین می توانید از آی سی مستقل ULN2003 و L293D استفاده کنید اما تعداد اتصالات بیشتر میشود.
قطعات مورد نیاز پروژه
- موتور استپ (28BYJ-48)
- درایور موتور ماژول ULN2003 / L293D
- میکروکنترلر Atmega16
- اسیلاتور کریستال 16 مگاهرتز
- دو خازن 100nF
- دو خازن 22pF
- دکمه

مدار پروژه کنترل استپ موتور با میکروکنترلر AVR
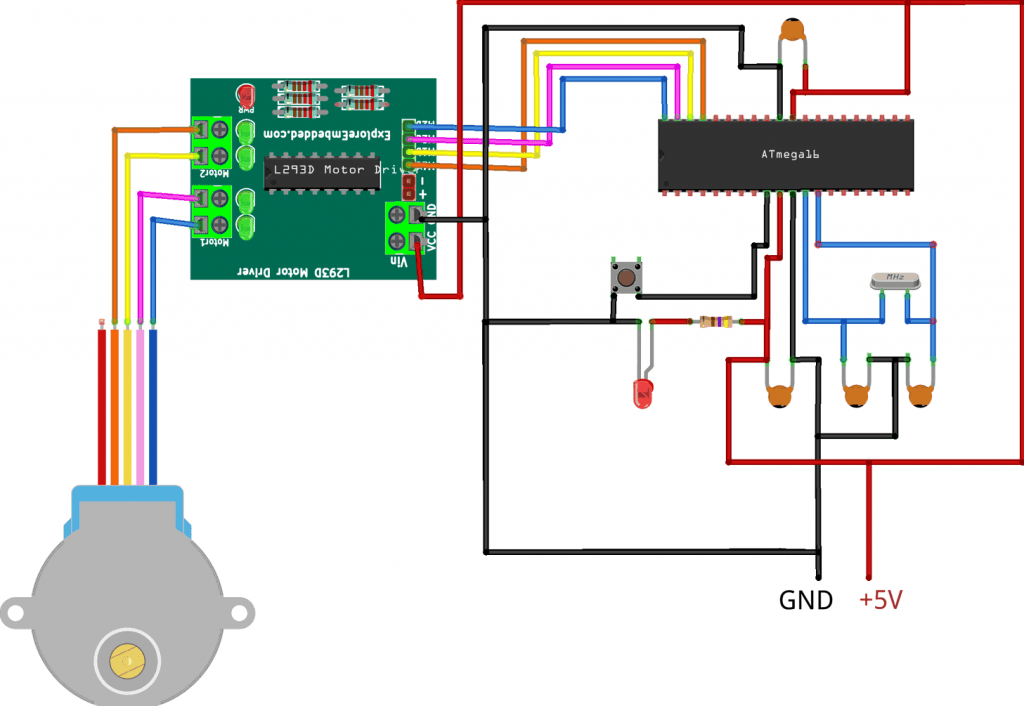
شماتیک کامل پروژه با هر دو موتور درایور در فایل دانلودی قرار داده شده است. ما از PORTA Atmega16 برای ارتباط موتور پله ای با هر دو درایور موتور استفاده می کنیم. نیازی به اتصال پین 5 ولت موتور پله ای نیست. فقط پین های سیم پیچ برای حرکت موتور پله ای لازم است. چهار ورودی ULN2003 / L293D و چهار خروجی ULN2003 / L293D در این پروژه استفاده شده است. ورودی ها به پین های PORTA متصل می شوند و خروجی ها به پین های سیگنال موتور متصل می شوند. همچنین ، برای تنظیم مجدد Atmega16 ، یک دکمه در پین reset وصل کنید. تمام پروژه از طریق منبع تغذیه 5 ولت تغذیه می شود.
موارد موجود در فایل : شماتیک کامل مدار با موتور درایور ، سورس کامل پروژه
برای دانلود فایل ها باید حساب کاربری داشته باشید ثبت نام / ورود






سلام و درود، من نیاز به یک برد کنترلری دارم که بتوانم برایش سرعت، جهت، گشتاور، زمان و تعداد مرحله حرکتهای 2تا استپر مواور رو تعریف کنم.امکان انجامش توسط شما. هست یا خیر؟ فعلا از پی ال سی استفاده میکنم اولا قیمت بالاست دوما. کار بر دستگاه نمیتواند سرعت و جهت و گشتاور و زمان رو تنظیم کند در صورت امکان جواب بفرمایید