استپر موتور چیست؟ (آموزش نحوه کار و استفاده از موتور پله ای)

محتویات
سلام. استپر موتور چیست ؟ (آموزش کامل نحوه کار موتور پله ای – Stepper Motor) را آماده کردیم.
استپر موتور چیست ؟
استپر موتور ها در ایران با نام استپ موتور و موتور پله ای شناخته میشوند. استپ موتور ها تقریبا در همه جا یافت میشوند. در دستگاه پخش دی وی دی ساده تا یک ماشین CNC بسیار دقیق یا … توانایی این دستگاه در ایجاد حرکات الکترونیکی دقیق کنترل شده باعث شده است که این موتور ها در بسیاری از دستگاه ها مثل دوربین مدار بسته ، هارد دیسک ها ، چاپگر های سه بعدی ، ربات ها ، برش لیزری و … استفاده شوند.

در این آموزش ما به طور کامل می آموزیم چه چیزی این موتور ها را خاص میکند و نحوه کار Stepper Motor را توضیح میدهیم. همچنین نحوه کار با این موتور ها را یاد میگیریم.
آشنایی با موتور پله ای
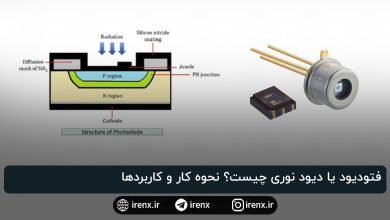
مانند تمام موتورها ، موتورهای استپر نیز دارای استاتور و روتور هستند، اما برخلاف موتور DC معمولی ، استاتور از مجموعه های کویل جداگانه ای تشکیل شده است. تعداد سیم پیچ ها بر اساس نوع موتور پله ای متفاوت خواهد بود، اما بدانید که در یک موتور استپ روتور از قطب های فلزی تشکیل شده است و هر قطب توسط مجموعه ای از سیم پیچ در استاتور جذب می شود. نمودار زیر یک موتور استپ با 8 قطب استاتور و 6 قطب روتور را نشان می دهد.

اگر به کویل های استاتور نگاهی بیندازید، آنها جفت کویل چیده شده اند، مانند A و A یک جفت را و B و B نیز یک جفت کویل را تشکیل می دهند. بنابراین هر یک از این جفت کوئلها یک الکترومغناطیس تشکیل می دهند و می توانند با استفاده از مدار درایور بصورت جداگانه انرژی بگیرند. هنگامی که یه سیم پیچ انرژی وارد می شود ، به عنوان آهنربا عمل می کند و قطب روتور با آن هم تراز می شود. هر بار که روتور می چرخد تا خودش را تنظیم کند تا با استاتور تراز شود، آن را یک مرحله می نامند. به طور مشابه با انرژی دادن به کویلها در یک دنباله می توانیم موتور را در پله های کوچک بچرخانیم تا یک چرخش کامل انجام شود.
انواع استپ موتور
به طور کلی سه نوع موتور استپ بر پایه ساخت وجود دارد که عبارتند از:
استپ موتور Variable reluctance: این نوع موتور دارای روتور هسته آهنی هستند که به سمت قطب استاتور جدب میشوند و با حداقل تمایل بین استاتور و روتور حرکت میکنند.
استپ موتور Permanent magnet: این نوع استپ موتور دارای آهنربای دائمی است و بر طبق پالس های اعمال شده به سمت استاتور دفع یا جذب میشوند.
استپ موتور Hybrid synchronous: این نوع موتور ترکیبی از دو نوع قبلی است.
جدای از اینها ما می توانیم موتورهای استپر را بر اساس نوع سیم پیچ استاتور نیز به عنوان تک قطبی و دو قطبی طبقه بندی کنیم.
استپ موتور دو قطبی : سیم پیچ های استاتور موجود در این نوع موتور سیم مشترک ندارند. درایو کردن این نوع موتور پله ای متفاوت و پیچیده است و بدون درایور میکروکنترلر نمیتوان مدار درایور را به راحتی طراحی کرد.
استپ موتور تک قطبی : در این نوع استپ موتور میتوانیم از مرکز سیم کشی هر دو سیم پیچ فاز برای یک زمین یا قدرت مشترک استفاده کنیم. این امر باعث میشود درایو کردن موتور ها آسان باشد. تصویر زیر در درک این موضوع به شما کمک خواهد کرد.

حالت های کار استپر موتور
از آنجا که استاتور استپ موتور از جفت کوبل های مختلف تشکیل شده است، هر جفت کویل میتواند در روش های مختلفی بر انگیخته شود. این امر باعث میشود استپر موتور در حالت های مختلفی کار کند، طبقه بندی زیر را مطالعه بفرمایید.
حالت استپ کامل
د راین حالت تحریک استپ موتور را میتوان یک به طور کامل 360 درجه ای چرخاند. اما در این حالت چرخش صاف نخواهد بود. در این حالت ما میتوانیم دو روش انجام دهیم.
1. پله ای کردن تک فاز : در این حالت فقط یک ترمینال (فاز) موتور در هر زمان انرژی می گیرد. در این صورت تعداد پله ها کمتر است و از رو میتواند 360 درجه کامل بچرخد. از آنجا که تعداد پله ها کمتر است ، میزان انرژی مصرف شده توسط این روش کم است. جدول زیر دنبال پله ها را برای یک اسپر موتور 4 فاز نشان میدهد.
| پله | فاز یک | فاز دو | فاز سه | فاز چهار |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
2. پله ای کردن دو فاز : همانطور که از نام این روش مشخص است، دو فاز یکی خواهند بود. این روش دارای همان مراحل پله ای کردن تک فاز است، اما از آنجا که دو سیم پیچ در یک زمان انرژی می گیرند می تواند گشتاور و سرعت بهتری را در مقایسه با روش قبلی فراهم کند. اگرچه این روش انرژی بیشتری را نیز مصرف می کند.
| پله | فاز یک | فاز دو | فاز سه | فاز چهار |
| 1 | 1 | 1 | 0 | 0 |
| 2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
حالت نیم استپ
حالت نیم پله یا Half Step ترکیبی از های تک فاز و دو فازا است. این ترکیب به ما کمک میکند تا از معایب ذکر شده در دو حالت قبلی راحت شویم. ما در حال ترکیب هر دو روش هستیم بنابراین باید 8 پله را در این روش انجام دهیم تا چرخش کامل بدست آید. توالی سوئیچینگ یک استپ موتور 4 فاز در زیر نشان داده شده است.
| پله | فاز یک | فاز دو | فاز سه | فاز چهار |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 0 | 1 | 1 |
| 6 | 0 | 0 | 0 | 1 |
| 7 | 1 | 0 | 0 | 1 |
| 8 | 1 | 0 | 0 | 0 |
حالت میکرو استپ
حالت میکرو پله از همه پیچیده تر است. اما این جالت دقت بسیار خوبی را در کنار گشتاور خوب و عملکرد خوب ارائه میدهد. در این روش سیم پیچ با دو موج سینوسی که از هم 90 درجه فاصله دارند، بر انگیخته میشوند. با این روش میتوان
میکرو استپ میتواند 256 پله را انجام دهد تا یک چرخش انجام شود. این باعث میشود موتور سریع تر و نرم تر چرخش کند.
نحوه استفاده از استپ موتور
بگذارید نگاهی بیاندازیم به موتور استپر 28-BYJ48 بیاندازیم.

برخلاف یک موتور DC معمولی ، چرا اینقدر سیم از این موتور بیرون آمده است ؟ برای درک این موضوع باید بدانید که موتور های پله ای نمیچرخند، بلکه از پله ای به پله ی دیگر میروند و به همین دلیل به عنوان موتور های پله ای شناخته میشوند. این موتور ها در خود دنباله ای از کویل ها دارند.
هنگامی که هر سیم پیچ انرژی میگیرد، موتور یک پله حرکت میکند و دنباله از انرژی باعث میشود موتور پیوسته بچرخد. بیایید به سیم پیچ های داخل موتور نگاهی بیاندازیم تا دقیقا بفهمیم این سیم های رنگی از کجا آمده اند.

همانطور که می بینید این موتور دارای آرایش 5 قطبی سیم پیچ تک قطبی است. چهار سیم پیچ وجود دارد که باید در یک دنباله خاص تغذیه شوند. سیم قرمز با +5 ولت تغذیه میشود و چهار سیم باقیمانده نیز برای فعال شدن به نوبت به GND متصل میشوند. ما از میکروکنترلر ها برای دادن انرژی به این کویل ها در یک دنباله خاص استفاده میکنیم. جدول دنباله کنترل 4 پله ای در زیر نشان داده شده است.
| پله | کویل انرژی گرفته |
| پله اول | A و B |
| پله دوم | B و C |
| پله سوم | C و D |
| پله چهارم | D و A |
محاسبه پله ها در هر چرخش برای استپ موتور
این مهم است که بدانید که چگونه استپ مربوط به هر چرخش را برای استپر موتور خود محاسبه کنید، زیرا تنها در این صورت می توانید آن را به طور موثر برنامه ریزی کنید.
بیایید فرض کنیم موتور را در دنباله 4 مرحله ای استفاده خواهیم کرد بنابراین زاویه گام 11.25 درجه خواهد بود.
پله در هر چرخش = 360/زاویه پله 360/11.25 = 32
چرا ما برای کنترل استپ موتور به ماژول درایور نیاز داریم ؟
بیشتر موتورهای پله ای فقط با کمک ماژول درایور کار می کنند. به این دلیل است که ماژول کنترلر (میکروکنترلر / مدار دیجیتال) قادر به تأمین جریان کافی از پین های I / O خود برای عملکرد موتور نخواهد بود. بنابراین ما از یک ماژول خارجی مانند ماژول ULN2003 یا مثلا L293D به عنوان درایور موتور پله ای استفاده خواهیم کرد. انواع مختلفی از ماژول درایور وجود دارد. حالا شما اطلاعات کافی برای کنترل هر موتور پله ای که برای آن نیاز دارید دارید.
حالا بیایید نگاهی به مزایا و معایب استفاده از استپر موتور بیاندازیم.
مزایای موتورهای استپر
یکی از مهمترین مزایای موتور پله ای این است که از کنترل موقعیت بسیار خوبی برخوردار است و از این رو می توان برای کاربرد هایی که نیاز به کنترل دقیق دارند استفاده کرد. همچنين گشتاور بسيار خوبي دارد كه آن را به انتخابي مناسب براي برنامه هاي رباتیک می كند. همچنین موتورهای پله ای دارای عمر بالاتری نسبت به موتورهای معمولی DC یا سروو موتور هستند.
معایب استپر موتور
مانند تمام موتور های دیگر ، استپ موتور ها نیز معایب خاص خود را دارند. زیرا با قدم های کوچک می چرخد و نمی تواند به سرعت بالایی برسد. همچنین نیاز به انرژی بیشتری دارند.