
پروژه ربات جاروبرقی هوشمند با آردوینو و التراسونیک

سلام. پروژه ربات جاروبرقی هوشمند با آردوینو و التراسونیک را آماده کردیم.
آموزش ساخت ربات تمیز کننده منزل با آردوینو
در این پروژه آردوینو ما یک ربات جارو برقی را میسازیم که به ما در تمیز و مرتب نگهداشتن خانه و محل کار کمک میکند. این ربات چهار چرخ به صورت هوشمند میتواند از برخورد با موانع و دیوار جلوگیری کند. این ایده توسط جاروبرقی معروف Robot Roomba الهام گرفته شده است که در تصویر زیر نشان داده شده است.
مدار ربات جاروبرقی هوشمند با آردوینو
در تصویر زیر شماتیک مدار این پروژه را مشاهده میکنید. این مدار ساده است و توضیحات آن در پایین آورده شده است.

انتخاب میکروکنترلر یک کار بسیار مهم است، زیرا این کنترلر به عنوان مغز ربات شما عمل خواهد کرد. بیشتر پروژه های این چنینی با آردوینو و رزبری پای ساخته میشود.در این پروژه ما از یک برد آردوینو Uno استفاده میکنیم.
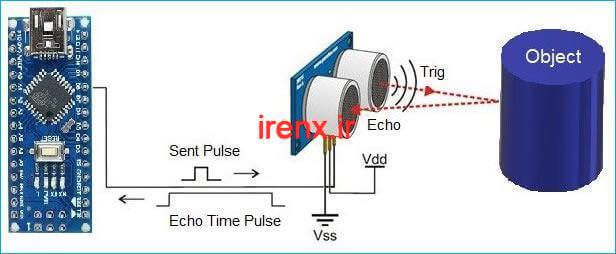
همانطور که در تصاویر پایین میبینید ما یک سنسور اولتراسونیک را به جلو و دو سنسور IR را در دو طرف روبات نصب کرده ایم.
حسگر اولتراسونیک از دو دایره تشکیل شده است که یکی از آنها برای ارسال سیگنال و دیگری برای دریافت اشعه استفاده می شود. مدت زمان انتقال و برگشت توسط میکروکنترلر محاسبه می شود. اکنون از آنجا که زمان و سرعت صدا مشخص است می توان فاصله را با فرمول های زیر محاسبه کرد.
فاصله = زمان x سرعت صدا / 2
مقدار تقسیم بر 2 میشود زیرا در ابتدا فاصله رفت و برگشت حساب میشود و با تقسیم کردن بر دو فقط فاصله ارسال موج محاسبه میوشد.
موتورهای بسیار زیادی در زمینه رباتیک استفاده می شود که بیشترین استفاده مربوط موتورهای استپر و سروو است. از آنجا که این پروژه هیچگونه محرک پیچیده ای ندارد، ما از یک موتور معمولی PMDC استفاده خواهیم کرد. باتری ما حجیم و سنگین است از این رو ما از چهار موتور برای رانندگی ربات استفاده می کنیم که هر چهار موتور یکسان هستند.
سخت ترین کار در هنگام ساختن روبات تهیه شاسی ربات ما است. مشکل در دسترسی ابزار و مواد است. شما میتوانید از اکریلیک ، چوب یا قطعات چاپ شده سه بعدی استفاده کنید.

انتخاب ظرفیت باتری باید آخرین بخش کار ما باشد زیرا صرفاً به شاسی و موتورهای شما بستگی دارد. در اینجا باتری ما باید جاروبرقی را هدایت کند که در حدود 3-5A نیاز داریم. از این رو به باتری سنگینی احتیاج خواهیم داشت. در اینجا ما از SLAB 12V 20Ah SLAB استفاده میکنیم اما شما میتوانید هر طوری که میخواهید این ربات و موتور هایش را تغذیه کنید.
پیشنهاد میکنم پروژه ربات تمیز کننده سطح با آردوینو را مشاهده کنید.


قطعات مورد نیاز
- ورق های چوبی برای شاسی
- سنسور مادون قرمز
- سنسور التراسونیک
- جاروبرقی با جریان DC
- آردوینو Uno
- باتری 12 ولت 20 آمپر
- آی سی درایور موتور (L293D)
جاروبرقی DC
از آنجا که ربات ما بر روی سیستم 12V 20Ah DC کار می کند. جاروبرقی ما باید یک جاروبرقی 12 ولت DC باشد.

درایور موتور (L293D)
درایور موتور یک ماژول واسطه بین آردوینو و موتور است.استفاده از درایور موتور به این دلیل است که میکروکنترلر Arduino قادر نخواهد بود جریان مورد نیاز موتور را تأمین کند و فقط می تواند 40 میلی آمپر را تأمین کند، از این رو کشیدن جریان بیشتر از آرردوینو باعث می شود تا به طور دائمی به آن آسیب برسد. ما از IC Driver Motor L293D استفاده خواهیم کرد که قادر به تامین حداکثر 1A است، از این رو این درایور اطلاعات را از Arduino دریافت می کند و موتور را مطابق دستورات انجام می دهد.
تست ربات و درایور موتور
کد کامل پروژه در انتهای صفحه در فایل دانلودی قرار داده شده است. توصیه می شود قبل از اتصال سنسورها ، یکبار درایور موتور و موتور ربات خود را با کد زیر تست کنید.
void setup()
{
Serial.begin(9600);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(11,OUTPUT);
pinMode(12,OUTPUT);
}
void loop()
{
delay(1000);
Serial.print("forward");
digitalWrite(9,HIGH);
digitalWrite(10,LOW);
digitalWrite(11,HIGH);
digitalWrite(12,LOW);
delay(500);
Serial.print("backward");
digitalWrite(9,LOW);
digitalWrite(10,HIGH);
digitalWrite(11,LOW);
digitalWrite(12,HIGH);
} اگر همه چیز خوب کار کرد ، می توانید سنسورها و آردوینو را همانطور که در شماتیک مدار نشان داده شده است وصل کنید و کد کامل را در Arduino بارگذاری کنید.
موارد موجود در فایل : سورس کامل ، شماتیک ها
برای دانلود فایل ها باید حساب کاربری داشته باشید ثبت نام / ورود







فایل پروژه خراب هست و باز نمیشه
سلام عزیز
بررسی شد فایل سالم هست. با نرم افزار WinRAR فایل دانلودی رو باز کنید
ارور the archive is either in unknown format or damaged میده با وینرار هم تست کردم
فایل رو دوباره دانلود کنید. فایل سالم هست
فایل رو چندبار با دو تا سیستم دانلود کردم فایل ایراد داره. اگه براتون مقدوره برام ایمیل کنید
مشکل احتمالا از اینترنت شما هست بخاطر تداخل اینروزای اینترنت، در انجمن یک موضوع در همین رابطه باز کنید کد رو براتون قرار میدیم
سلام وقت بخیر
امکان داره بگید که سر مثبت و منفی باتری رو علاوه بر اینکه به برد وصل کنم، به کدوم پایه های l293d متصل کنم؟
سلام عزیز. مطابق این مطلب آموزش جامع L293D با برد آردوینو (کنترل جهت و سرعت موتور)
سلام وقت بخیر
باتری باید فقط به ورودی تغذیه برد وصل بشه ؟
سلام عزیز
پایه های ورودی سنسور ها و l293d رو هم به تغذیه متصل کنید
سلام وقت بخیر
امکان داره لطف کنید مدل سنسور التراسونیک و مدل سنسور مادون قرمزی که در این پروژه استفاده شده رو بگید؟
سلام عزیز
سنسور التراسونیک HC-SR04 و مادون قرمز هم معمولی
استفاده از باتری ۲۰ آمپری به خاطر موتور های ربات هست یا جارو شارژی از این باتری استفاده میکند؟
چون موتورها ی زرد بیشتر از ۱ آمپر کشش ندارند درسته؟
سلام عزیز
باتری برای تغذیه موتور ها و جاروبرقی هست