
سروو موتور چیست؟ انواع و طرز کار سروو موتور

سرو موتورها مدت طولانی است که در بسیاری از پروژه ها مورد استفاده قرار می گیرند. اندازه آنها کوچک است اما بسیار کاربردی و بسیار کم مصرف هستند. این ویژگی ها به آنها امکان می دهد تا برای ماشین های اسباب بازی ، ربات ها و هواپیما های کنترل از راه دور یا رادیو کنترل استفاده شوند. سرو موتورها همچنین در مصارف صنعتی ، رباتیک ، تولید درون خطی ، داروسازی و خدمات غذایی مورد استفاده قرار می گیرند.
سروو موتور چیست؟
سروو موتور نوعی موتور است که می تواند با دقت زیادی دوران کند. به طور معمول این نوع موتور از یک مدار کنترل تشکیل شده است که بازخوردی را در مورد موقعیت فعلی شافت موتور ارائه می دهد ، این بازخورد به موتورهای سروو اجازه می دهد تا با دقت زیادی بچرخند. اگر می خواهید یک جسم را در چند زاویه یا فاصله خاص بچرخانید ، از سروو موتور استفاده کنید.
انواع مختلفی از سرو موتورها نیز بر اساس نوع چیدمان دنده و ویژگی های عملکردی وجود دارد. سروو موتور معمولاً دارای آرایش دنده ای است که به ما امکان می دهد گشتاور بسیار بالایی بدست آوریم و همچنین میتوان در بسته بندی های کوچک و سبک تهیه کنیم. با توجه به این ویژگی ها ، آنها در بسیاری از برنامه ها مانند ماشین اسباب بازی ، هلیکوپتر RC و هواپیما ، رباتیک و غیره استفاده می شوند.
سرو موتورها بر حسب کیلوگرم در سانتی متر درجه بندی می شوند بیشتر سروو موتورهای مختص سرگرمی 3 کیلوگرم بر سانتی متر یا 6 کیلوگرم بر سانتی متر یا 12 کیلوگرم بر سانتی متر درجه بندی می شوند. این کیلوگرم بر سانتی متر به شما می گوید که سروو موتور شما می تواند در یک فاصله خاص چه وزنی را بلند کند. به عنوان مثال: یک سروو موتور 6 کیلوگرم بر 1 سانتی متر باید بتواند بار 6 کیلوگرمی را که در فاصله 1 سانتی متری موتور قرار دارد، بلند کند. هرچقدر فاصله بار از موتور بیشتر شود، ظرفیت حمل وزن کاهش پیدا میکند. موقعیت یک موتور سروو توسط پالس الکتریکی تعیین می شود و مدار آن در کنار موتور قرار می گیرد.
پیشنهاد میکنم پروژه کنترل چند سروو موتور با آردوینو را مشاهده کنید.
مکانیزم کار سرو موتور
مکانیزم سروو موتور متشکل از سه قسمت است:
- دستگاه کنترل شده
- سنسور خروجی
- سیستم بازخورد
این یک سیستم بسته است که در آن از سیستم بازخورد مثبت برای کنترل حرکت و موقعیت نهایی شافت استفاده می شود. دستگاه توسط یک سیگنال بازخورد تولید شده توسط مقایسه سیگنال خروجی و سیگنال ورودی مرجع کنترل می شود.
در اینجا سیگنال ورودی مرجع با سیگنال خروجی مرجع مقایسه می شود و سیگنال سوم توسط سیستم بازخورد تولید می شود. و این سیگنال سوم به عنوان یک سیگنال ورودی برای کنترل دستگاه عمل می کند. این سیگنال تا زمانی وجود دارد که سیگنال بازخورد تولید شود یا تفاوتی بین سیگنال ورودی مرجع و سیگنال خروجی مرجع وجود داشته باشد. بنابراین وظیفه اصلی مکانیزم سروو موتور حفظ خروجی یک سیستم در مقدار مطلوب در صورت وجود نویز است.
طرز کار سروو موتور
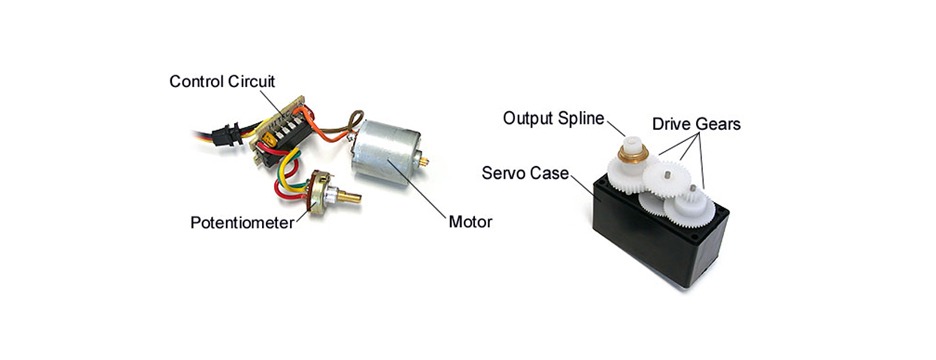
سروو از یک موتور (DC یا AC) ، پتانسیومتر، چرخ دنده و یک مدار کنترل تشکیل شده است. اول از همه ، ما از چرخ دنده برای کاهش دور در دقیقه و افزایش گشتاور موتور استفاده می کنیم. در موقعیت اولیه شافت سروو موتور، موقعیت دکمه پتانسیومتر به گونه ای است که هیچ سیگنالی در خروجی پتانسیومتر تولید نمیشود.
اکنون یک سیگنال الکتریکی به ترمینال ورودی دیگر “تقویت کننده تشخیص خطا” داده می شود. اکنون تفاوت بین این دو سیگنال ، یکی از پتانسیومتر و دیگری از منابع دیگر ، در مکانیزم بازخورد پردازش می شود و خروجی از نظر سیگنال خطا ارائه می شود. اکنون شافت موتور به پتانسیومتر متصل شده و با چرخش شافت موتور، پتانسیومتر سیگنال تولید میکند. بنابراین تغییر زاویه سروو موتور، باعث تغییر زاویه پتانسیومتر و در نهایت باعث تغییر سیگنال بازخورد خروجی میشود.
بعد از مدتی موقعیت پتانسیومتر در جایگاهی قرار می گیرد که خروجی پتانسیومتر همان سیگنال خارجی ارائه شده است. در این شرایط ، هیچ سیگنال خروجی از تقویت کننده به ورودی موتور وجود نخواهد داشت زیرا هیچ تفاوتی بین سیگنال اعمال شده خارجی و سیگنال تولید شده در پتانسیومتر وجود ندارد و در این شرایط چرخش موتور متوقف می شود.
ارتباط سروو موتور با میکروکنترلر
رابط کاربری موتورهای سروو مانند موتور سروو s90 با میکروکنترلر (میکروکنترلر چیست؟) بسیار آسان است. از سروو موتور ها سه سیم خارج میشود. از این سیم ها، دو سیم برای تغذیه (مثبت و منفی) و دیگری برای سیگنالی است که قرار است از میکروکنترلر ارسال شود. سروو موتور MG995 Metal Gear معمولاً برای ربات های انسان نما، RC و … استفاده می شود. تصویر MG995 در زیر نشان داده شده است:
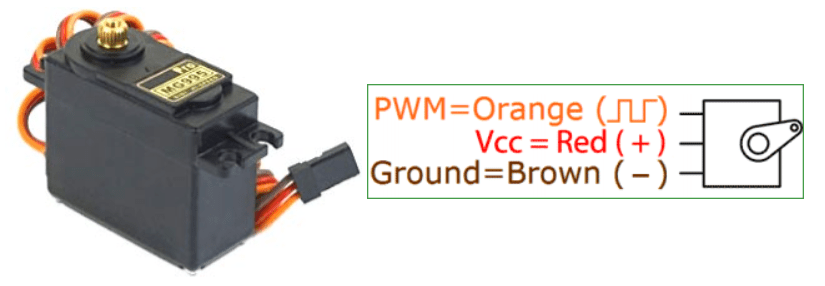
رنگ سیم های سروو موتور شما ممکن است متفاوت باشد از این رو دیتاشیت سروو موتور خود را بررسی کنید. تمام سروو موتورها مستقیماً تغذیه 5 ولت کار می کنند اما اگر می خواهید بیش از دو موتور سروو استفاده کنید ، باید مراقب میزان جریانی که موتور مصرف می کند باشید.
کنترل سرو موتور
همانطور که گفته شد، سه سیم از سروو موتور ها خارج می شود. از این تعداد دو سیم برای تغذیه (مثبت و منفی) و دیگری برای سیگنالی که قرار است از میکروکنترلر ارسال شود استفاده خواهد شد.


برای درک نحوه کنترل سروو موتور باید با PWM آشنا باشید، بنابراین مقاله PWM چیست را بخوانید.
سروو موتور توسط PWM کنترل می شود. حداقل پالس، حداکثر پالس و سرعت تکرار در اینجا مهم است. سروو موتور میتواند از هر دو جهت 90 درجه بچرخد. سروو موتور انتظار دارد هر 20 میلی ثانیه یک پالس دریافت کند و طول پالس میزان چرخش موتور را تعیین میکند. به عنوان مثال یک پالس 1.5 میلی ثانیه ای باعث میشود موتور به حالت 90 درجه برود. اگر پالس کوتاه تر از 1.5 میلی ثانیه باشد، شافت به سمت 0 درجه میرود و اگر از طول پالس از 1.5 میلی ثانیه باشد، شافت سروو موتور به سمت 180 درجه میرود.
سرو موتور بر اساس اصل PWM (مدولاسیون عرض پالس) کار می کند ، به این معنی که زاویه چرخش آن با مدت زمان پالس اعمال شده به پین آن کنترل می شود. اساساً سرو موتور از موتور DC تشکیل شده است که توسط یک مقاومت متغیر (پتانسیومتر) و برخی چرخ دنده ها کنترل می شود.
نیروی پر سرعت موتور DC توسط چرخ دنده ها به گشتاور تبدیل میشود. ما میدانیم که “کار انجام شده = فاصله * نیرو”. در موتور DC نیرو کم و فاصله زیاد است و در سروو موتور نیرو زیاد و فاصله کم است. پتانسیومتر برای محاسبه زاویه و متوقف کردن موتور DC در زاویه مورد نظر، به شافت سروو موتور متصل است.

سرو موتور می تواند از 0 تا 180 درجه چرخانده شود ، اما بسته به نوع، محدوده چرخش می تواند تا 210 درجه نیز افزایش یابد. این درجه چرخش را می توان با استفاده از پالس الکتریکی با عرض مناسب ، روی پین کنترل آن کنترل کرد. سروو پالس را در هر 20 میلی ثانیه بررسی می کند. پالس با عرض 1 میلی ثانیه می تواند سروو را به 0 درجه ، 1.5 میلی ثانیه تا 90 درجه (موقعیت خنثی) و پالس 2 میلی ثانیه آن را به 180 درجه بچرخاند.
انواع سرو موتور
دو نوع سرو موتور وجود دارد : AC و DC. سروو AC می تواند موج های جریان بالاتر را کنترل کند و در ماشین آلات صنعتی استفاده میشود. سروو های DC برای موج های جریان بالا طراحی نشده اند و معمولاً برای کاربردهای کوچکتر مناسب اند. به طور کلی ، موتور های DC قیمت کمتری نسبت به موتور های AC دارند. سروو موتور های DC به طور خاص برای چرخش های مداوم ساخته شده اند و برای استفاده در ربات ها مناسب هستند.

کاربرد سروو موتور
سروو موتور ها در هواپیما های رادیو کنترل، آسانسور ها، راه رفتن ربات ها، بازو های رباتیک و … استفاده میشوند. سروو موتور ها کوچک هستند و نسبت به اندازه قدرت خوبی دارند. در خدمات غذایی و دارویی ، سروو موتور ها برای استفاده از موقعیت های سخت طراحی شده اند. همچنین سروو موتور ها در تولیدات نیز استفاده میشوند مثلا برای جایی که تکرار زیاد و دقت یک عمل مورد نیاز است.







متاسفانه من با آردینو آشنایی ندارم نمیدونم چیه
من میخام سروو رو وصل کنم به رادیوکنترل ولی نمیدونم چجوری تنظیم میشه
میتوانید این مطلب رایگان را مشاهده کنید آموزش کنترل سروو موتور با آردوینو Due
دوره آردوینو را مشاهده کنید کنترل سروو موتور آموزش داده شده
سلام من تو ماشینهای آرسی میبینم که چرخش سروو کمتراز۹۰درجس سرووهایی که برای فرمان استفاده میشه
من میخام سروو بخرم اما نمیدونم باید ازکدوم نوع باشه لطفا کمک کنین نیازبه سروو ای دارم که چرخش۴۰درجه داشته باشه اینوچجوری تنظیم میکنن .ازکجابفهمیم پالس ارسالی رادیو کنترل چقدره
لطفا یه توضیح بدین
سلام عزیز
ما در دوره آردوینو به صورت کامل کنترل سروو موتور را آموزش دادیم میتوانید مشاهده کنید
حتی کنترل سروو موتور به صورت بی سیم هم آموزش داده شده
سلام نام ما هارون رحیمزی است اول از شما زیاد تشکری میکنم که شما برای مردم اموزش ها اریه یا ریکارد میکنی شما افتخار ما است تشکر
بعدان یک چند سوال است ایا شما همرای ما در وتساپ شخصی ما صحبت کرده میتوانی این است شماره ما
و سوال دوم ما این است وقت که ما یک پروژه دیزاین کنم در مثال در Payton بعدان انان کپی کنم در سافتور اردینو کود های انان ما چگونه همرای انان وصل کنم یعنی یک پروژه ما الی جور کردم انان کود در کجا ذخیره کنم باید در انان پروژه کمپیوتر استفاده کنم یا چگونه محترم
تشکر