
پروژه قایق موتوری RC کنترلی با آردوینو (رادیویی – پرسرعت)

در این پروژه ، ما یک قایق آردوینو کنترل از راه دور خواهیم ساخت که می تواند با استفاده از ماژول های رادیویی RF 433 مگاهرتز به صورت بی سیم کنترل شود. ما با فرستنده 433 مگاهرتز و ماژول گیرنده، این قایق را از راه دور کنترل خواهیم کرد. در مورد کنترل از راه دور یا ارتباط بین دو دستگاه، ما گزینه های زیادی مانند مادون قرمز، بلوتوث ، اینترنت ، RF و … داریم. ارتباطات رادیویی دارای مزایایی مانند برد زیاد هستند. همچنین ، این ماژول ها می توانند دو روش ارتباطی را انجام دهند ، به این معنی که می تواند همزمان داده ها را منتقل و دریافت کنند.
فیلم زیر به شما در درک نحوه کار این قایق کنترلی کمک میکند.
قسمت کنترل قایق (فرستنده)
در قسمت فرستنده از ماژول فرستنده RF 433 استفاده میکنیم. این نوع ماژول بسیار کوچک است و دارای 3 پایه VCC ، GND و Data است. برخی از ماژول های دیگر دارای یک پایه آنتن اضافی هستند. ولتاژ کاری ماژول فرستنده 3V-12V است و این ماژول هیچگونه اجزای قابل تنظیم ندارد. یکی از مهمترین مزایای این ماژول مصرف کم است.
قسمت فرستنده شامل 4 دکمه است. آردوینو وضعیت دکمه ها را میخواند. دستور مورد نظر را به قسمت رمزگذار میفرستد و در نهایت اطلاعات رمزگذاری شده توسط ماژول فرستنده RF ارسال میشوند.
اتصالات مدار قسمت کنترل قایق در زیر نشان داده شده است:
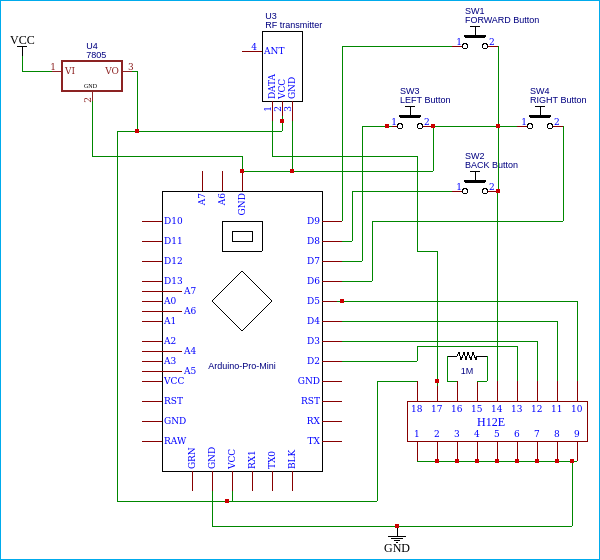
در مدار بالا ، مشاهده میکنید که دکمه ها به پایه های دیجیتالی آردوینو و GND متصل شده اند. زمانی که ما دکمه را فشار می دهیم، پین های دیجیتال مربوطه LOW می شوند. چهار ورودی موازی رمزگذار HT12E به چهار پایه دیجیتال دیگر آردوینو (D2-D5) متصل شده است.
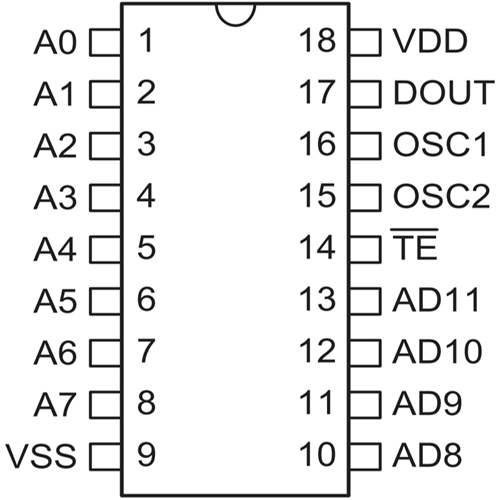
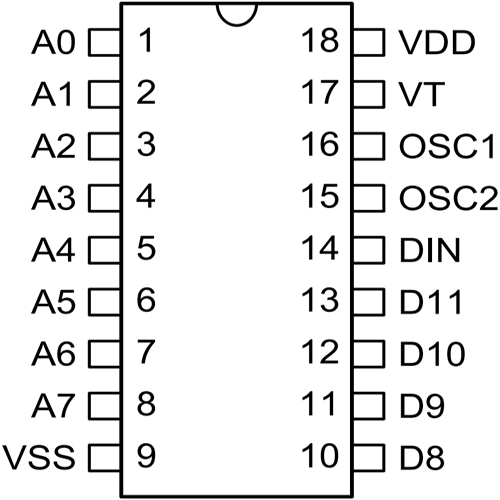
رمزگذار HT12E یک رمزگذار 12 بیتی و یک رمزگذار ورودی-سریال ورودی موازی است. از 12 بیت ، 8 بیت بیت آدرس است که می تواند برای کنترل چندین گیرنده استفاده شود. پین های A0-A7 پین های ورودی آدرس هستند. در این پروژه ، ما فقط یک گیرنده را کنترل می کنیم ، بنابراین نمی خواهیم آدرس آن را تغییر دهیم ، بنابراین من تمام پایه های آدرس را به GND متصل کردم. اگر می خواهید گیرنده های مختلف را با یک فرستنده کنترل کنید ، می توانید از سوئیچ های dip استفاده کنید. AD8-AD11 ورودی های بیت کنترل هستند. این ورودی ها خروجی های D0-D3 رسیور HT12D را کنترل خواهند کرد. برای برقراری ارتباط باید یک اسیلاتور وصل کنیم و فرکانس نوسان ساز برای عملکرد 5 ولت باید 3KHz باشد. مقدار مقاومت برای 5 ولت 1.1MΩ خواهد بود. سپس خروجی HT12E را به ماژول فرستنده وصل کردم.
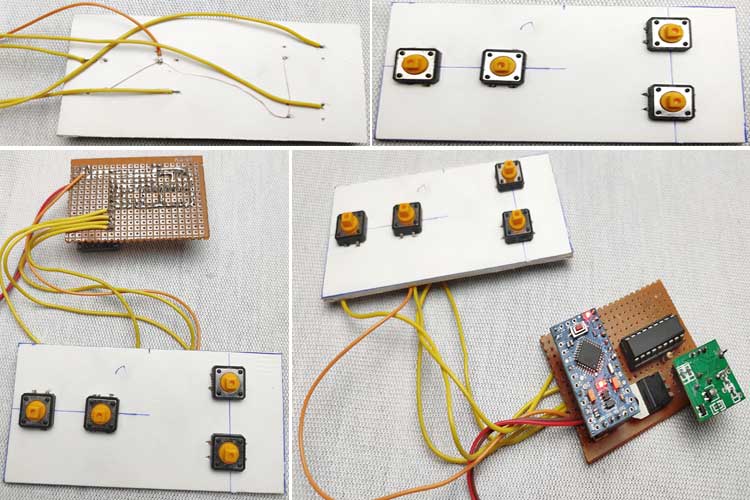
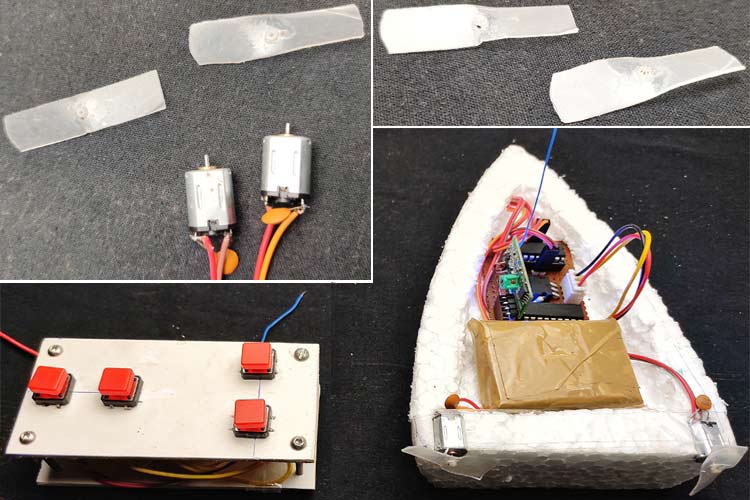
میتوانید محفظه قسمت کنترل قایق را مشابه تصاویر زیر طراحی کنید.
قسمت حرکت قایق (گیرنده)
این گیرنده نیز بسیار کوچک است و دارای 4 پایه VCC ، GND و دو پایه Data است. ولتاژ کاری این ماژول 5v است. مانند ماژول فرستنده ، این نیز یک ماژول کم مصرف است. بعضی از ماژول ها دارای یک پین آنتن اضافی هستند.
در قسمت گیرنده، ماژول گیرنده RF 433 اطلاعات ارسالی را دریافت میکند. توسط ماژول رمزگشا اطلاعات رمزگشایی میشوند. در نهایت با توجه به اطلاعات دریافتی، ماژول موتور درایور، موتور ها را فعال میکند.
اتصالات مدار قسمت حرکت قایق در زیر نشان داده شده است:
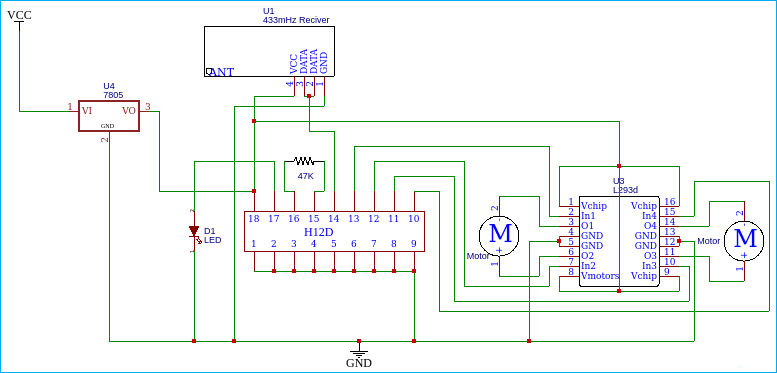
HT12D یک رسیور 12 بیتی خروجی-ورودی، موازی-سریال است. پین ورودی HT12D به گیرنده ای متصل می شود که دارای خروجی سریال است. در میان 12 بیت ، 8 بیت (A0-A7) بیت آدرس است و HT12D ورودی را رمزگشایی می کند ، فقط اگر با آدرس فعلی آن مطابقت داشته باشد. D8-D11 بیت های خروجی هستند. برای مطابقت این مدار با مدار فرستنده ، تمام پین های آدرس را به GND متصل کردم. داده های خارج از ماژول نوع سریال است و HT12D این داده های سریال را به داده های موازی اصلی رمزگشایی می کند و اطلاعات ما از طریق D8-D11 خارج می شود. برای مطابقت با فرکانس نوسان ، باید مقاومت 33-56k را به پایه های نوسان ساز متصل کنید. ولتاژ ورودی گیرنده نیز 6-12 ولت است.


میتوانید محفظه قسمت حرکت قایق را مشابه تصاویر زیر طراحی کنید.
قطعات مورد نیاز برای قایق کنترلی آردوینو
- فرستنده و گیرنده 433 مگاهرتز
- آردوینو (هر نوع آردوینو ، برای کاهش اندازه از Pro mini استفاده می کنیم)
- HT12E و HT12D
- دکمه – 4 عدد
- مقاومت 1 مگا اهم و 47 کیلو اهم
- درایور موتور L293d
- باتری 9 ولت (من از یک باتری 7.4 ولتی استفاده می کنم) – 2 عدد
- رگولاتور 7805- 2 عدد
- موتورهای DC – دو عدد
- خازن 1uf – دو عدد
نحوه حرکت قایق RC آردوینو
این قایق دارای دو موتور است که می تواند آن را به سمت چپ و راست حرکت دهد. ا
- حرکت به جلو: اگر هر دو موتور چپ و راست به جهت عقربه های ساعت بچرخند که حرکت به جلو است.
- حرکت عقب: اگر هر دو موتور چپ و راست خلاف جهت عقربه های ساعت بچرخند (این ملخ هوا را از قسمت عقب و اگزوز را به سمت جلو می مکد) باعث حرکت عقب می شود.
- حرکت چپ: اگر فقط موتور راست چرخانده شود که قایق است فقط از سمت راست بکشید که قایق به سمت چپ حرکت می کند.
- حرکت راست: اگر فقط موتور چپ بچرخد ، قایق فقط از سمت چپ کشیده می شود که باعث حرکت قایق به سمت راست می شود.
برنامه نویسی آردوینو برای قایق کنترلی
برنامه نویسی این قایق بسیار ساده است. ما می توانیم با توابع اصلی آردوینو به چیزی که میخواهیم برسیم. کد کامل این پروژه را می توانید در پایین همین صفحه دانلود کنید. در این جا قسمت های مهم کد را توضیح میدهیم.
ما برنامه را با تعریف اعداد صحیح برای چهار دکمه ورودی و پایه های رسیور ورودی شروع می کنیم.
int f_button = 9; int b_button = 8; int l_button = 7; int r_button = 6; int m1=2; int m2=3; int m3=4; int m4=5;
در قسمت setup حالت پین ها را تعریف میکنیم. یعنی دکمه ها به پایه های دیجیتال متصل می شوند بنابراین این پایه ها باید به عنوان ورودی تعریف شوند و همچنین باید پایه های m1 تا m4 را در حالت خروجی قرار دهیم.
pinMode(f_button,INPUT_PULLUP); pinMode(b_button,INPUT_PULLUP); pinMode(l_button,INPUT_PULLUP); pinMode(r_button,INPUT_PULLUP); pinMode(m1,OUTPUT); pinMode(m2,OUTPUT); pinMode(m3,OUTPUT); pinMode(m4,OUTPUT);
در مرحله بعدی در عملکرد void loop ، ما وضعیت دکمه را با استفاده از Digitalread می خوانیم. اگر وضعیت پین LOW باشد ، به این معنی است که دکمه مربوطه فشرده شده و شرط زیر اجرا میشود.
if ( digitalRead(f_button)==LOW)
که یعنی دکمه جلو فشرده شده
{
digitalWrite(m1, LOW);
digitalWrite(m3, LOW);
digitalWrite(m2, HIGH);
digitalWrite(m4, HIGH);
} این m1 و m2 به حالت LOW میبرد و باعث فعال شدن هر دو موتور در سمت گیرنده می شود. به همین ترتیب ، برای حرکت به عقب
{
digitalWrite(m1, HIGH);
digitalWrite(m3, HIGH);
digitalWrite(m2, LOW);
digitalWrite(m4, LOW);
} برای حرکت چپ
{
digitalWrite(m1, LOW);
digitalWrite(m3, HIGH);
digitalWrite(m2, HIGH);
digitalWrite(m4, HIGH);
} برای حرکت راست
{
digitalWrite(m1, HIGH);
digitalWrite(m3, LOW);
digitalWrite(m2, HIGH);
digitalWrite(m4, HIGH);
} پس از کامپایل کد ، آن را در برد آردوینو خود بارگذاری کنید.
موارد موجود در فایل : سورس کامل
برای دانلود فایل ها باید حساب کاربری داشته باشید ثبت نام / ورود







سلام مهندس خسته نباشی بی زحمت امکان آپلود کد روی برد رو توضیح میفرمایید؟و بردش پند متره؟
سلام ممنون بابت پروژه و اینکه میشه به جای کلید فشاری جوی استیک گذاشت
سلام عزیز
بله میشه یک مقدار در کد باید تغییرات ایجاد کنید
سلام مهندس خسته نباشید
آیا میشه همچین پروژه هایی رو (کنترل رادیویی) با میکروکنترلر اجرا کرد یعنی برنامه نویسی و سخت افزار فرستنده و گیرنده رو خودمون انجام بدیم اگر میشه لطف کنید راهنمایی کنید در چه زمینه ای مطالعه و آموزش ببینیم
سلام عزیز
بله میشه
بستگی به پروتکل ارتباطی داره مثلا با بلوتوث در دوره اردوینو اموزش داده شده
سلام وقتتون بخیر
من دیکودر و اینکودر های ht12d و ht12e رو نمیتونم پیدا کنم
جایگزین ندارن؟
سلام
ببخشید فایل صفر کیلو بایت هست ، انگار خرابه؟
سلام عزیز، فایل سالم هست
یعنی اگه توی گیرنده کد نزنیم کار میکنه
سلام. در قسمت گیرنده چیزی نیست که بشه توش کد ریخت. فقط باید مدار رو بسازید.
سلام ببخشید کدوم ها کد های فرستنده هستند
باید این کد هم روی گیرنده وهم روی فرستنده دانلود کنیم
شماتیک روی برد اردوینو مدل نانو همین هستش
میشه از ادوینو ی پیکو استفاده کرد
سلام جناب، قسمت گیرنده کد نداره و کدی که در فایل قرار داده شده مربوط به فرستنده هست. کد باید روی فرستنده آپلود بشه. بهتر هست از برد معرفی شده در پست استفاده کنید.