
بازوی رباتیک چیست؟ معرفی کامل بازو های صنعتی

بازو های صنعتی یا بازو های رباتیک ماشین هایی هستند که برای مدیریت یا کنترل مواد بدون ایجاد تماس مستقیم استفاده می شوند. در اصل از آن برای کنترل اشیا رادیواکتیو یا زیستی خطرناکی استفاده می شود که کنترل آن برای شخص دشوار است. اما اکنون از آن ها در بسیاری از صنایع برای انجام کارهایی مانند بلند کردن اجسام سنگین، جوشکاری مداوم با دقت بالا و غیره استفاده می شود. به غیر از صنایع، در بیمارستان ها نیز از آن ها به عنوان ابزارهای جراحی استفاده می شود. امروزه پزشکان به طور گسترده ای از بازو های رباتیک در عمل های خود استفاده می کنند.
قبل از اینکه در مورد انواع بازو های صنعتی به شما بگویم، می خواهم در مورد مفاصل صحبت کنم.
یک مفصل دارای دو مرجع است. اولین مورد، قاب مرجع معمولی ثابت است. قاب مرجع دوم ثابت نیست و بسته به وضعیت مفصل (یا مقدار مفصل) که پیکربندی آن را مشخص می کند، نسبت به قاب مرجع اول حرکت می کند.
ما در اینجا در مورد دو مفصل که در ساخت انواع مختلف بازو های صنعتی استفاده می شود، خواهیم پرداخت.
1. بازوی رباتیک مفصل چرخشی
آن ها یک درجه آزادی دارند و حرکات چرخشی (1 درجه آزادی) بین اجسام را توصیف می کنند. پیکربندی آن ها با یک مقدار تعریف می شود که میزان چرخش حول محور z اولین قاب مرجع آن ها را نشان می دهد.
می توانید در اینجا مفصل چرخشی بین دو جسم را مشاهده کنید. در اینجا دنبالگر می تواند حول پایه خود حرکت چرخشی داشته باشد.
2. بازوی رباتیک مفصل منشوری
اتصالات منشوری یک درجه آزادی دارند و برای توصیف حرکات انتقالی بین اجسام استفاده می شوند. پیکربندی آن ها با یک مقدار تعریف می شود که میزان انتقال در محور Z اولین قاب مرجع آن ها را نشان می دهد.
می توانید در اینجا مفصل های منشوری مختلفی در یک سیستم را مشاهده کنید.
انواع مختلف بازو های رباتیک
در صنایع با توجه به نیاز از انواع مختلف بازو های صنعتی استفاده می شود. برخی از آن ها بدین شرح است :
ربات مختصات دکارتی
در این ربات صنعتی، محور 3 اصلی آن مفاصل منشوری دارد یا به طور خطی در بین یکدیگر حرکت می کنند. ربات های دکارتی برای توزیع چسب مثلا در صنایع اتومبیل سازی، بسیار مناسب هستند. مزیت اصلی دکارتی ها این است که آن ها قادر به حرکت در چندین جهت خطی هستند. همچنین آن ها قادر به رسم خط مستقیم هستند و برنامه ریزی آن ها راحت است. معایب ربات دکارتی این است که فضای زیادی را اشغال می کنند چرا که بیشتر فضای این ربات غیرقابل استفاده است.
ربات SCARA
SCARA مخفف Selective Compliance Assembly Robot Arm (بازوی ربات مونتاژ سازگار انتخابی) یا Selective Compliance Articulated Robot Arm (بازوی ربات مفصلی سازگار انتخابی) است. ربات های SCARA حرکاتی مانند بازوی انسان دارند. این ماشین ها شامل مفصل “شانه” و “آرنج” همراه با محور “مچ” و حرکت عمودی هستند. ربات های SCARA دو مفصل چرخشی و یک مفصل منشوری دارند. ربات های SCARA حرکات محدودی دارند اما همین حرکات محدود جزو مزایای آن ها نیز به حساب می آید چرا که می توانند سریعتر از ربات های 6 محوری دیگر حرکت کنند. همچنین بسیار سفت و سخت و با دوام هستند. از آن ها بیشتر در برنامه های کاربردی ای استفاده می شود که به حرکات سریع، تکرار پذیر و نقطه به نقطه ای مفصلی مانند پالت گذاری، پالت گذاری DE، بارگیری / تخلیه ماشین و مونتاژ نیاز دارند. معایب آن این است که حرکات محدودی دارند و انعطاف پذیری زیادی ندارند.



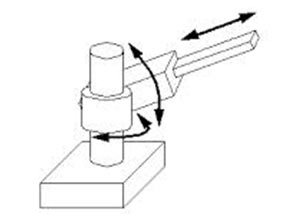
ربات استوانه ای
این در اصل یک بازوی رباتی است که به دور یک قطب استوانه ای شکل حرکت می کند. یک سیستم رباتیک استوانه ای، سه محور حرکتی دارد – محور حرکت دایره ای و دو محور خطی در حرکت افقی و عمودی بازو. بنابراین یک مفصل چرخشی، یک استوانه ای و یک مفصل منشوری دارد. امروزه ربات های استوانه ای کمتر مورد استفاده قرار می گیرند و ربات هایی با انعطاف پذیری بیشتر و سریعتری جایگزین آن ها می شوند اما هنوز هم جایگاه بسیار مهمی در تاریخ دارند زیرا قبل از توسعه ربات شش محوره، برای دست و پنجه نرم کردن با کار ها و انجام آن ها مورد استفاده قرار می گرفتند. مزیت آن این است که در صورتی که دو نقطه شعاع یکسانی داشته باشند می تواند بسیار سریعتر از ربات دکارتی حرکت کند. عیب آن این است که برای اینکه از سیستم مختصات دکارتی به سیستم مختصات استوانه ای تبدیل شود به تلاش زیادی نیاز دارد.

ربات PUMA
PUMA (ماشین قابل برنامه ریزی جهانی برای مونتاژ یا بازوی جهانی قابل برنامه ریزی) رایج ترین ربات صنعتی مورد استفاده در مونتاژ، جوشکاری و آزمایشگاه های دانشگاه ها است. این ربات بیشتر از ربات SCARA به بازوی انسان شباهت دارد و نسبت به آن از انعطاف پذیری بسیار بیشتری برخوردار است اما این امر دقت آن را نیز کاهش می دهد. بنابراین از آن ها در کارهایی که به دقت کمتری احتیاج دارند مانند مونتاژ، جوشکاری و جا به جایی اجسام استفاده می شود.این ربات سه مفصل گردشی دارد اما همه مفاصل موازی نیستند، مفصل دوم از پایه با مفاصل دیگر عمود بر هم (حالت متعامد) هستند. این موضوع باعث می شود PUMA در هر سه محور X، Y و Z سازگار باشد. عیب آن دقت کم است، بنابراین نمی توان از آن در کاربرد های حساس و کاربرد هایی که به دقت بالایی احتیاج دارند استفاده کرد.

ربات های قطبی
گاهی اوقات به عنوان ربات های کروی در نظر گرفته می شوند. این ها بازو های ربات ساکن با پوشش های کروی یا تقریبا کروی هستند که می توانند در یک سیستم مختصات قطبی قرار بگیرند. آن ها پیچیده تر از ربات های دکارتی و SCARA هستند، اما راه حل کنترلی آن ها پیچیدگی کمتری است. این ربات ها دو مفصل چرخشی و یک مفصل منشوری برای ایجاد فضای کاری تقریبا کروی دارند. کاربرد های اصلی آن در عملیات های جا به جایی در خط تولید و ربات بردار و بگذار است.
از نظر طراحی مچ دو پیکربندی دارد.
Pitch-Yaw-Roll (XYZ) مانند بازوی انسان و Roll-Pitch-Roll مانند مچ کروی است. مچ کروی به دلیل اینکه از نظر مکانیکی اجرای آن ساده تر است محبوب تر از بقیه است. این تنظیمات ویژه ای را نشان می دهد که می تواند هنگام کار با ربات، شناسایی و در نتیجه از آن اجتناب شود. توازن بین سادگی راه حل های مقاوم و وجود پیکربندی های منحصر به فرد، برای طراحی مچ کروی مناسب است و همین دلیل موفقیت آن است.







با سلام و درود
بنا به نیاز کاری سوال دارم ممنون میشوم پاسخ بدهید با تشکر
1_برای فرمان دادن به 3عدد درایو استپرموتور (تعداد دور،تعداد پالس،مقدار گشتاور،شیب حرکتی و استپ،زمان حرکت و جهت حرکت،سیکل ترکیبی هر سه موتور با هماهنگی هم چه بردی رو برای اموزش دیدن انتخاب کنم.