
پروژه ربات انسان نما با آردوینو (ساخت ربات دو پا)

سلام. پروژه ربات انسان نما با آردوینو (آموزش ساخت ربات دو پا با Arduino) را آماده کردیم.
آموزش ساخت ربات آدم با آردوینو
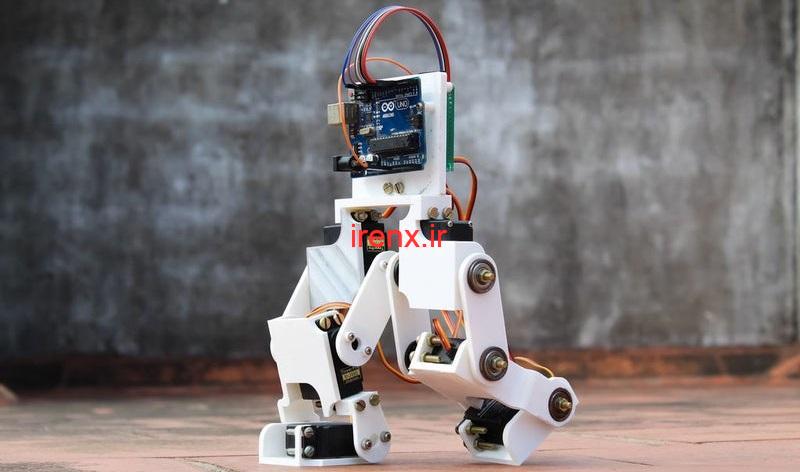
من همیشه به ربات ها علاقه داشته ام. ربات هایی که رفتار انسان ها را تقلید میکنند بسیار جذاب هستند. علاقه من باعث شد تا تلاش کنم یک ربات انسان نما را در سایت قرار دهم. رباتی که در این پروژه میسازیم میتواند راه برود و بدود. در این پروژه آردوینو به طور کامل با ساخت یک ربات دو پا آشنا میشویم.
میتوانید فیلم زیر را ببینید تا به طور کامل با ساخت این ربات آشنا شوید.
هدف اصلی در این آموزش این است که روبات ما به اندازه کافی محکم باشد تا با دویدن و راه رفتن های طولانی آسیب نبیند. هدف فرعی ما طراحی یک بدنه دوپا برای این پروژه است. این طرح ساخته شده است و شما میتوانید به راحتی آن را از انتهای مطلب دانلود کنید و به وسیله چاپ گر های سه بعدی، با ظرافت بدنه خود را داشته باشید. فیلم عملکرد پروژه در انتهای مطلب قرار گرفته است.
مراحل ساخت ربات انسان نما با Arduino :
- فرآیند طراحی
- چاپ قطعات طراحی شده
- قطعات مورد نیاز
- اتصال سروو موتور ها
- برقراری اتصال بین قطعات
- مونتاژ پا های ربات
- طراحی PCB (اختیاری)
- مونتاژ بدنه
- تنظیمات اولیه کد
- توضیحات حرکت زانو ها (اختیاری)
- بارگذاری کد کامل پروژه
1: فرآیند طراحی
قطعات مورد نیاز این ربات را طراحی کرده ایم و به رایگان میتوانید در انتهای مطلب آن را دانلود کنید. ابتدا سروو موتور ها و پا ها طراحی کردیم. پا ها طوری طراحی شده اند که دارای شافت در دو طرف موتور باعث ایجاد پایداری و استحکام میشود.
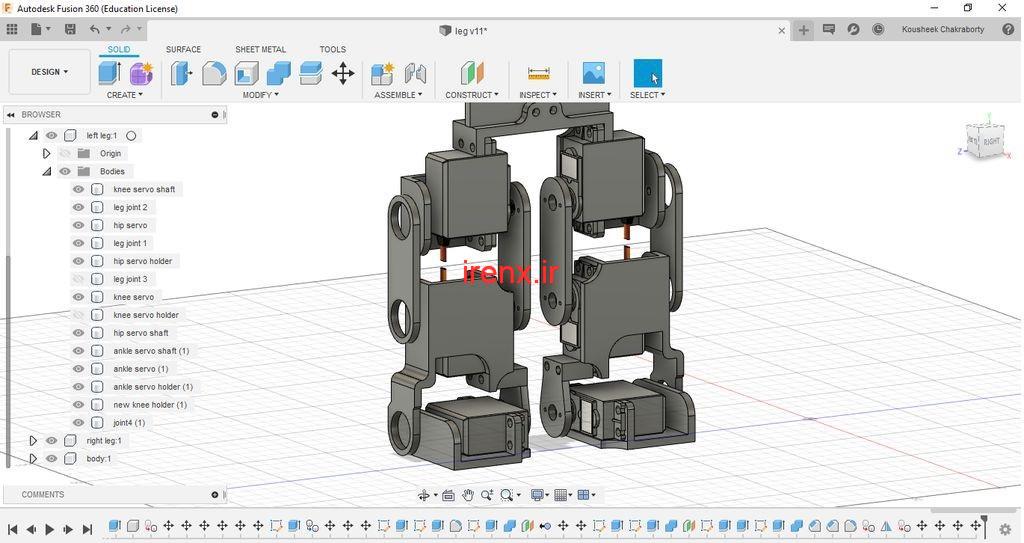
این طراحی با هدف فشرده سازی ربات و استفاده حداکثری از گشتاور ارائه شده توسط موتور سروو ها انجام شده است. در صورتی که به چاپگر سه بعدی در شهر خود دسترسی ندارید میتوانید به آسانی چاپ سه بعدی را به صورت آنلاین سفارش دهید.
2: چاپ قطعات طراحی شده
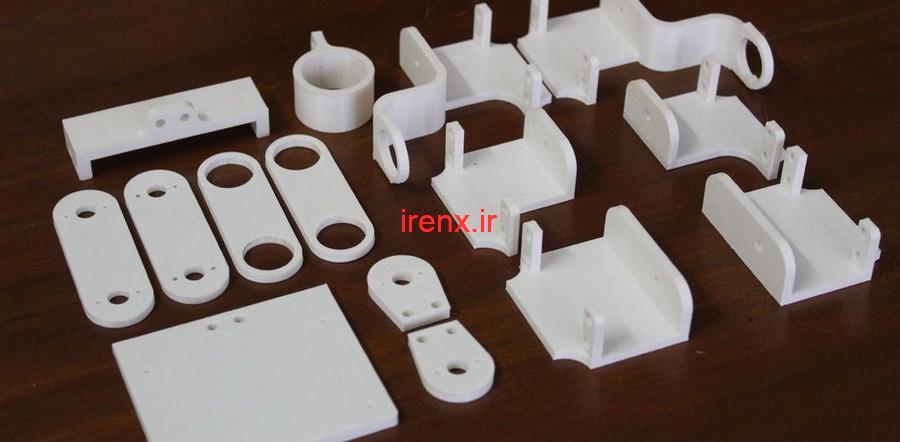
قطعات مورد نیاز این پروژه باید به صورت سفارشی طراحی شوند، بنابراین از چاپگر سه بعدی برای چاپ آنها استفاده می شود. چاپ در حالت 40٪ infill و 2 پارامتر، نازل 0.4 میلی متر و ارتفاع لایه 0.1 میلی متر با PLA و رنگ مورد نظر شما ساخته شده می شود. در فایل دانلودی لیست طرح ها را میبینید. از قطعات زیر باید چند نسخه چاپ کنید :
- bearing link x 2
- servo horn link x 2
- foot link x 2
- bridge x 1
- electronics mount x 1
- electronics spacer x 8 (اختیاری)
- servo horn space x 12 (اختیاری)
3: قطعات مورد نیاز
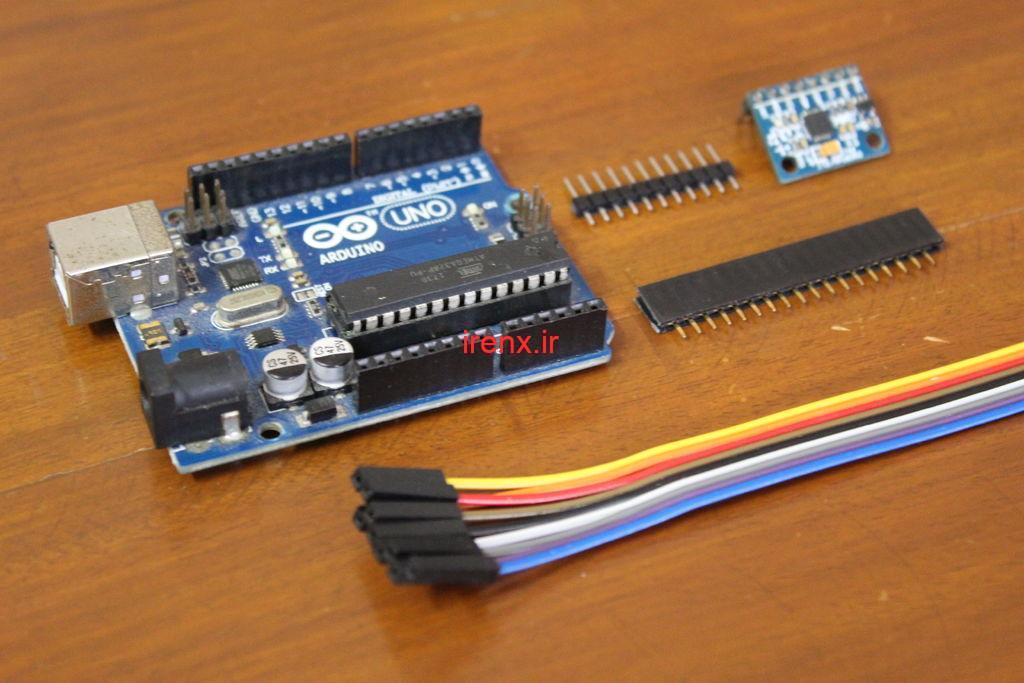
در اینجا لیست تمام قطعات مورد نیاز برای ساخت ربات انسان با آردوینو آورده شده است. تمام قطعات در دسترس هستند و به راحتی آن ها را پیدا میکنید.
- برد آردوینو Uno
- سروو موتور Towerpro MG995 – شش عدد
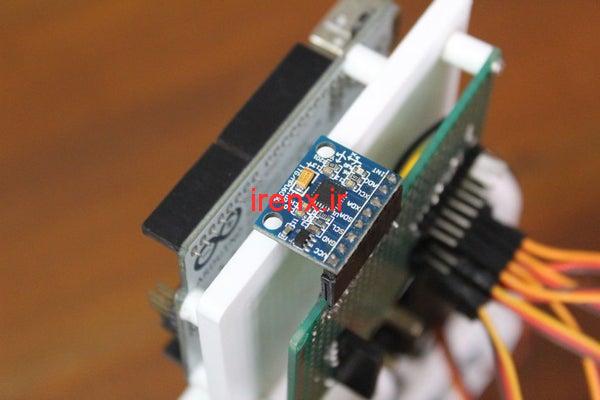
- شتاب سنج MPU6050 (اختیاری)
- سنسور التراسونیک (اختیاری)
- بلبرینگ اسکیت (8x22x7mm)
- پیچ و مهره M4

4: اتصال سروو موتور ها

سپس باید سروو موتور ها را به ربات متصل کنیم. پس از چاپ تمام قسمت ها می توانید با تنظیم سرو و براکت های سروو شروع کنید. ابتدا به یاتاقان نگهدارنده زانو فشار وارد کنید. تناسب باید کاملاً رعایت شده باشد توصیه میشود سطح داخلی سوراخ ها را کمی گشاد کنید. سپس پیچ M4 را از طریق سوراخ عبور داده و با استفاده از مهره آن را محکم کنید. تصاویر نحوه اتصال قطعات زانو و پا و طراحی کامل ربات در فایل دانلودی انتهای صفحه قرار داده شده است.


5: برقراری اتصال بین قطعات

پس از جمع شدن براکت ها، اتصالات را شروع کنید. برای ایجاد پیوند بلبرینگ، بار دیگر به آرامی سطح داخلی سوراخ ها را برای بلبرینگ گشاد کنید و سپس یاتاقان را در هر دو طرف به سوراخ فشار دهید. نحوه اتصال قطعات به هم با استفاده از تصاویر در فایل دانلودی به طور کامل قابل مشاهده است.
6: مونتاژ پا های ربات

پس از اتصال قطعات و براکت ها ، میتوانید آن ها را نیز به هم متصل کنید تا بتوانید پای ربات را بسازید. ابتدا از اتصال سروو های ران و زانو شروع کنید. سپس پا را به زانو متصل کنید. ممکن است این کار دشوار باشد اما ارزشش را دارد. به تصاویر دقت کنید تا به طور کامل با نحوه اتصال آشنا شوید.
7: طراحی PCB (اختیاری)

این مرحله اختیاری است. برای انجام سیم کشی، تصمیم گرفتیم PCB دلخواه خود را با استفاده از پین های برد و پین های هدر تهیه کنم. PCB شامل پورتهایی است که مستقیماً سیمهای موتور سروو را به هم وصل می کند. همچنین دارای پورت برای منبع تغذیه خارجی مورد نیاز برای تغذیه موتورهای سروو است. از اتصال سیم جامپر برای ارتباط USB و توان خارجی برای آردوینو استفاده می شود. Arduino و PCB را با استفاده از پیچ ها و فاصله های چاپی سه بعدی سوار کنید.
توجه: حتماً قبل از اتصال آردوینو از طریق USB، سیم های جامپر را از آن جدا کنید. عدم انجام این کار ممکن است به آردوینو آسیب برساند. اگر تصمیم دارید که از PCB استفاده نکنید اتصالات سروو را مانند زیر انجام دهید.
اتصالات سروو ها به آردوینو
- ران چپ به پین 9
- ران راست به پین 8
- زانوی چپ به پین 7
- زانوی راست به پین 6
- پای چپ به پین 5
- پای راست به پین 4
برای اتصال PCB به آردوینو با استفاده از اطلاعات بالا، از سیم های معمولی نر و مادگی استفاده کنید.
8: مونتاژ بدنه
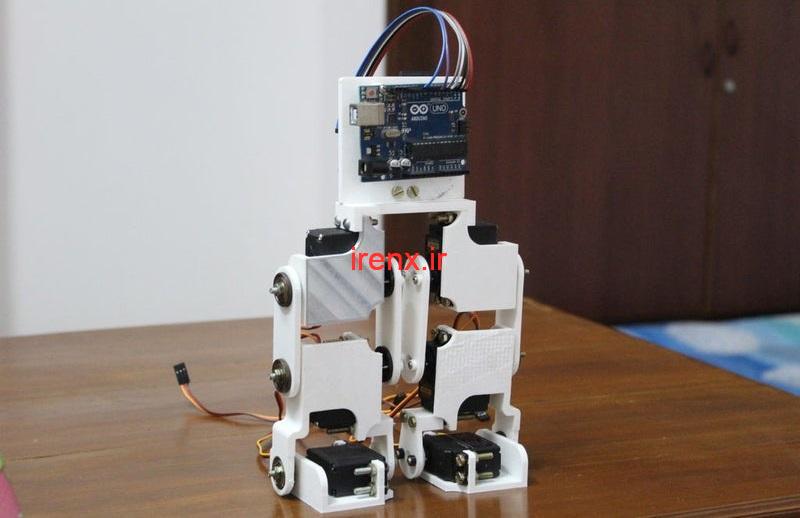
پس از اتصال پا ها، همه قطعات را به هم متصل کنید تا بدنه ربات به طور کامل ساخته شود.از پیچ و مهره M4 برای ساخت اتصالات استفاده کنید. نحوه اتصال به طور کامل در فایل دانلودی انتهای صفحه توضیح داده شده است.
9: تنظیمات اولیه کد

که موتورهای سروو نیازی به هم ترازی کامل ندارند تا نسبتاً موازی بمانند. به همین دلیل است که “موقعیت مرکزی” هر سرو موتور باید به صورت دستی تنظیم شود تا با پاها هماهنگ شود. برای رسیدن به این هدف، شاخهای سروو را از هر سروو خارج کرده و طرح اولیه setup.ino (در فایل دانلودی) را اجرا کنید. . پرونده constants.h را که در فایل دارد باز کنید و مقادیر انحراف سروو (خطوط 1-6) را تغییر دهید تا پاها کاملاً تراز شوند و صاف باشد. با مقادیر بازی کنید و در مورد آنچه لازم است در پرونده خود ایده بگیرید. مقادیر را تغییر دهید و سروو موتور ها را دست کاری کنید تا به طور کامل موازی بمانند.
برای راهنمایی به تصاویر مراجعه کنید.
10: بارگذاری کد کامل پروژه
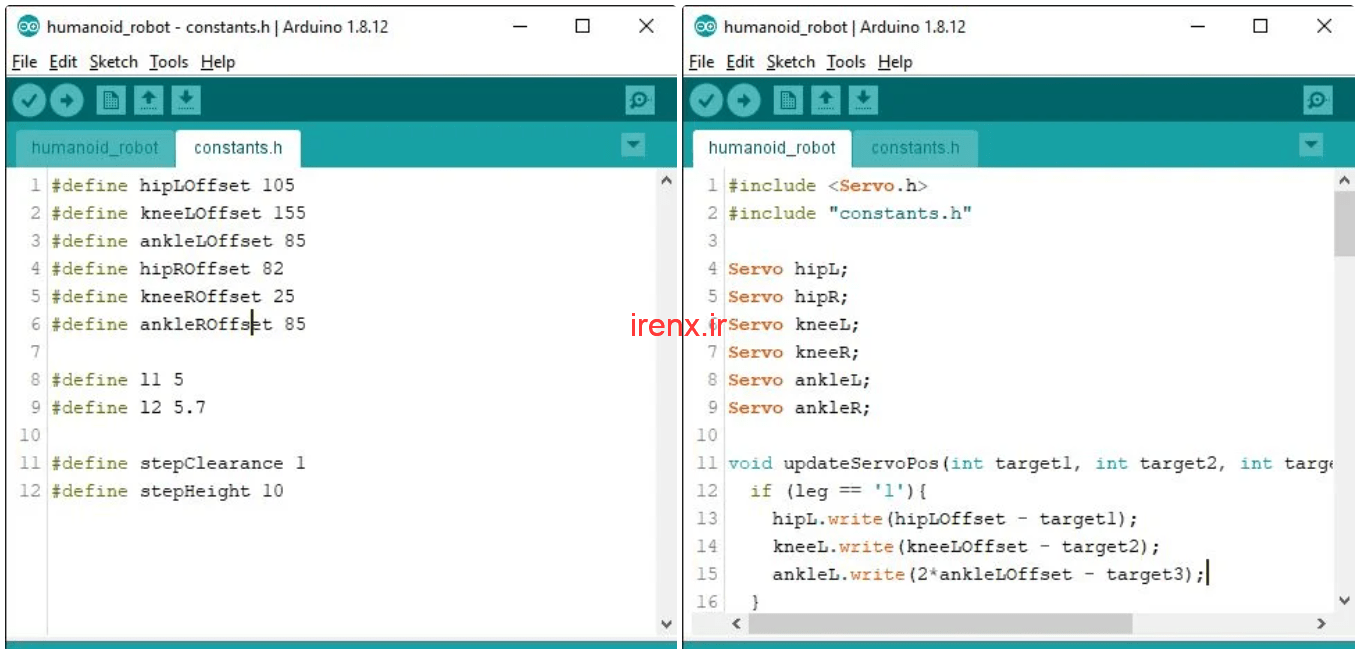
قبل از برنامه نویسی Arduino ، باید تغییرات جزئی در پرونده انجام شود. مقادیر انحرافی که در قسمت قبل بدست آوردید را باید در کد پروژه وارد کنید.
توجه: اگر از طرح های ارائه شده در این آموزش استفاده کرده اید، چیزی برای تغییر نیاز ندارید. در صورتی که مواردی را تغییر دادید و بر طبق این آموزش پیش نرفتید باید تغییرات جزئی در کد آردوینو را انجام دهید. L1 فاصله ثابت بین محور ران و محور زانو است. L2 فاصله بین محور زانو و محور مچ پا است. بنابراین اگر طرح خود را استفاده کردید حتما این موارد را تغییر دهید.
پس از آپلود کد داده شده و روشن کردن ربات، ربات به صورت ساده به سمت جلو حرکت میکند. شما میتوانید بر طبق سلیقه خود نحوه حرکت ربات را تغییر دهید و امکانات دیگری را به آن اضافه کنید.
موارد موجود در فایل : سورس کامل ، تصاویر مورد نیاز
برای دانلود فایل ها باید حساب کاربری داشته باشید ثبت نام / ورود






سلام ممنون از شما
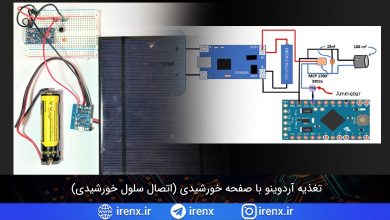
سلام ببخشید برای ربات کلاً چند ولت و چند آمپر نیاز و لطفاً بگین با چه وسیلهای به ربات برق برسونم
سلام ببخشید سروو موتور ها دنده فلزی باشه یا میتوان از پلاستیکی هم استفاده کرد
سلام عزیز
بستگی به پروژه شما دارد
دنده فلزی استفاده کن ، دنده پلاستیکی به مرور زمان خورده میشه
سلام وقتتون بخیر
آیا امکانش هست که این ربات رو در قالب یک پک برای بنده بفرستید و من هزینه رو براتون واریز کنم. چون من با آردوینو کار نکرده ام ولی دوست دارم یک ربات راه رونده رو خودم درست کنم و خودم همه کارهاش رو انجام بدم ولی با راهنمایی شما.؟
سلام عزیز
به صورت آماده امکان ارسال نیست. برای یادگیری کار با آردوینو دوره آموزش آردوینو ما را مشاهده کنید کامل یاد میگیرید.
من تنه پایین و بالاشو ساختم و کامل شده البته برای دوسال پیش تنه بالاشو کامل دادم طراحی کردن با پرینت سه بعدی حدود 10 میلیون شد الان فکر کنم بالا 20 میلیون باید هزینه کنید بغیر از سروو موتورا
سلام من این ربات را ساختم اما به درستی راه نمیرود مقادیر constant را درست کردم اما فایده ندارد میتوانم فیلم حرکت ربات را ارسال کنم تا بگویید اشکال از کجاست ؟
سلام خسته نباشید
میشه فایل سه بعدی رو با سروو موتور mg90s رو در فایل پروژه قرار بدید
ممنون از سایت خوب شما
سلام من این پروژه دارم انجام میدم البته با تغییرات
کاش توضیحات جز به جز درباره کد نویسی توضیح میدادین
سلام عزیز
در هر قسمت کد نویسی سوالی داشتید در انجمن مطرح کنید راهنماییتون میکنیم
سلام، وقت بخیر
شرکتها برای پرینت ۳بعدی قطعات فایل طراحی میخوان، چطور میتونم فایل طراحی قطعات این ربات رو داشته باشم؟
سلام
من این ربات رو ساختم میخواستم بدونم کسی هست بتونه به این ربات یک سنسور فاصله سنج اضافه کنه که سرعت راه رفتن رو کنترل کنه؟؟
سلام خیلی ممنون از سایتتون
ببخشید اون عکسی که نقشه کل رباط در اون قرار داره به صورت کامل
میشه فایلشو قرار بدید در سایت
خیلی ممنون میشم
سلام بله بیزحمت فایلو بزارین
سلام برای فایل های پرینتر تو فایل زیپ تعداد فایل های اس تی ال بیشتر از سایته میشه بگید از فایل های داخل زیپ هر کدام چندتا پرینت بگیریم و اون اختیاری ها کجا قرار میگیرند بدون اون ها هم میشه درست کرد
سلام ببخشید یک سوال داشتم
با همین مکانیک و بدنه ربات
میتونیم کد هارو جوری بنویسیم که حرکت پاهاش بهتر و با کیفیت تر بشه
که وقتی داره راه میره کامل یک پاش از رو زمین جدا شه تا قدم برداره
سلام عزیز
بله شما میتونید با توجه به نیازتون بدنه را تغییر دهید
سلام خیلی ممنون از سایتتون
چندتا سوال داشتم
ربات رو با سروو موتور های دیگه مثل mg90s هم میشه ساخت؟
اگر میشه ابعداد قسمتهایی که پیچ میخوره رو تغییر بدم کافیه یا نیاز به تغییرات دیگه هم داره؟
سلام عزیز
بله امکانش هست باید بررسی کنید خودتون ممکن هست نیاز به تغییر کد و ابعاد باشه
سلام اگر بخوام که رباتم به چپ و راست بره و بتونه از پله هم بالا بره باید چه سنسورهای دیگه ای بهش اضافه کنم؟
سلام عزیز
باید سروو موتور ها را مطابق با بدنه ای که ربات داره و کاری که میخواهید انجام بده برنامه ریزی کنید.
سلام .آیا میتوان به ربات دستور پریدن یا راه رفتن داد .
برای این کار باید کدش را تغییر و چطور
سلام عزیز
بله اما تغییر زیادی در کد نیاز هست. برای یادگیری برنامه نویسی اردوینو میتوانید دوره آموزش آردوینو را مشاهده کنید
سلام وقت بخیر
ببخشید این قطعات رو که با پرینتر 3 بعدی چاپ کردید، اونهایی که چاپگر ندارن چطوری میتونیم تهیه کنیم؟ و اینکه امکانش هست فایل 3D قطعات رو بزارید؟
سلام عزیز
شرکت هایی هستند که چاپ کردن فایل های سه بعدی را انجام میدهند در گوگل سرچ کنید
سلام وقت بخیر
سه سوال داشتم خدمتتون اگر امکان داره پاسخ بدید
1) منبع تغذیه ای که نیاز داره چند آمپر باید باشه؟ (اگر مستقیم به کامپیوتر یا موبایل وصل کنیم می تونه انرژی لازم را بهش بده؟) مثلا چه باتری براش مناسبه؟
2) توی تصاویر یه قسمت دایره ای شکل بزرگ دیده میشه که توی فایل ها هم نیست و من توی شکل نهایی هم پیداش نمی کنم. این کجا استفاده شده؟
3) اگر هرجا که بلبرینگ می فروشند اسم بلبرینگ اسکیت را بیاریم همین اندازه ای بهمون میدن؟
سلام عزیز
فکر میکنم منبع تغذیه 2 آمپر مناسب باشه
متوجه نشدم کدوم دایره سیاه رو میگید
توی عکس بخش چاپ قطعات طراحی شده
بالا سمت چپ
دومین قطعه
قطعه مشابه استوانه توخالی
این قطعه کجا کاربرد داره که توی فایل ها هم نیستش
توی شکل نهایی که نیست بنابراین نیازی نیست به اون
سلام
سرو موتور 180 درجه هست یا 360؟
سلام عزیز
180 درجه هست
سلام
شما قطر داخلی بلبرینگ را ۷ زدید با پیچ و مهره M4 چجوری می توان بلبرینگ را پیچ کرد ؟
سلام عزیز
مطابق با آموزش پیش برید اگر جایی مشکلی بود تعویض مهره و پیچ به سایز کوچک و بزرگتر کار ساده ای هست
سلام و عرض ادب میشه لطف کنید طریقه استفاده از محتوای فایل رو یه توضیح یا فیلم اموزشی بدید ????
سلام عزیز
اگر با آپلود کردن کد و آردوینو آشنایی ندارید دوره آموزش آردوینو رو مشاهده کنید
سلام بخش اتصال ماژول شتاب سنج نیست این ماژول رو باید به کدوم پین آردوینو وصل کنیم ؟
سلام عزیز، ماژول شتاب سنج اختیاری هست و میتونید استفاده نکنید
سلام ببخشید میشه شماتیک ش رو بزارید
سلام جناب، نیازی به تصویر شماتیک نیست فقط باید سروو موتور ها متصل بشند که در پست پین های ارتباط آردوینو با سروو ها نوشته شده.
سلام میشه اموزش ساخت رادیو کنترل در سایت قرار بدید
سلام جناب، در زمینه ارتباط های رادیویی مطالب بسیار زیادی در سایت موجود هست میتونید جستجو بفرمایید.
سلام ایا میتونید برای ما اموزش ساخت یک پرینتر 3بعدی رابگذارید اصا امکان ساخت این وسیله بصورت دستی هست؟
سلام، سعی میکنیم به زودی راه اندازی پرینتر 3 بعدی با آردوینو رو در سایت قرار بدیم.
سلام
خسته نباشید .
تعداد بلبرینگ ها رو نزدید ؟ چن تا بلبرینگ میخواد ؟؟؟
سلام جناب. در محل اتصال قطعات بدنه و در صورتی که به صورت متحرک باشد، بلبرینک استفاده میشود. میتوانید با استفاده از تصاویر و بررسی نهایی قطعات چاپ شده توسط چاپگر سه بعدی تعداد بلبرینگ های مورد نیاز خود را بدست میاورید.
ایا میشود برای این ربات دست طراحی کرد یا دوربین رویش نصب کرد یا بزرگ تر ساختش
بله هر کاری رو میتونید انجام بدید. در این پروژه ای که ما قرار دادیم این امکانات نیستند و خودتون باید اضافه کنید.
سلام برای ربات کلاً چند ولت و چند آمپر نیاز و لطفاً بگین با چه وسیلهای به ربات برق برسونم